



















Chapter 4 Parameters|
Revision August 2008, 03VE, SW V2.04 4-73
Settings Functions Descriptions
40
Speed Attained
(including zero speed)
Active when the output frequency reaches frequency setting or
stop.
41 Multi-position Attained
User can set any three multi-function input terminals to 41. The
current position action status of these three terminals will be
outputted. Example: if setting Pr.02-11, Pr.02-12 and Pr.02-13
to 41 and only the multi-position of the second point has been
done. Therefore, current status are RA (OFF), MRA (ON) and
MO1 (OFF). In this way, their status is 010.
42 Crane Function
This function should be used with Pr.02-31, Pr.02-32 and
Pr.02-33.
Active when setting Pr.07-16=Pr.02-33 and Fcmd > Pr.02-33
and output current > Pr.02-32 and Time > Pr.02-31.
The example of the crane application is in the following for
your reference.
43
Motor Zero-speed
Output (Pr.02-43)
Active when motor actual speed is less than Pr.02-43.
44
Max. Reel Diameter
Attained
Active when the reel diameter is equal to Pr.08-43.
45
Empty Reel Diameter
Attained
Active when the reel diameter is equal to Pr.08-44.
46 Broken Belt Detection
The broken belt occurs when 1. line speed is higher than
Pr.08-61, 2. the error of reel diameter exceeds Pr.08-61, 3.
detection time exceeds Pr.08-62
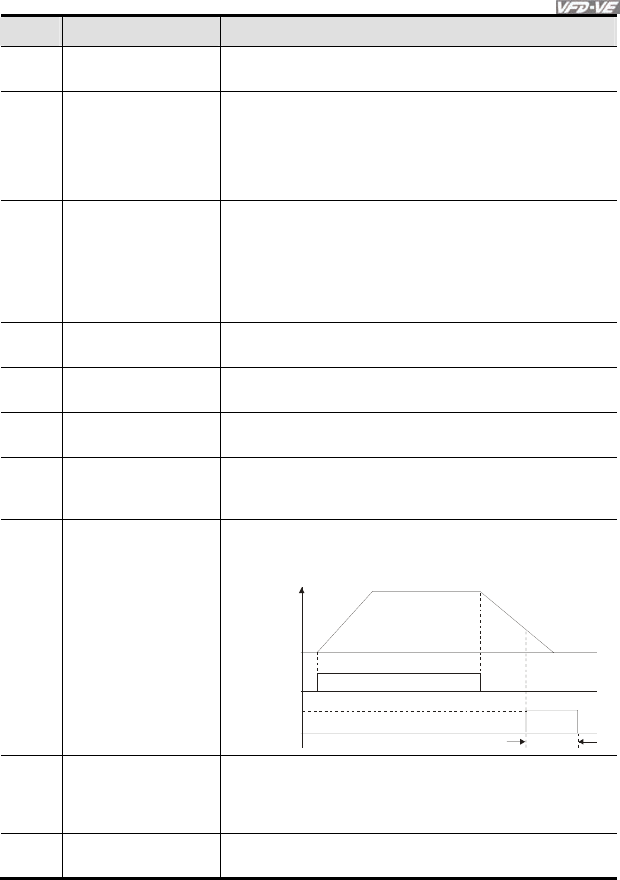
47 Break Release at Stop
When drive stops, the corresponding multi-function terminal
will be ON if the frequency is less than Pr.02-33. After it is ON,
it will be OFF when brake delay time exceeds Pr.02-31.
02-31
RUN
RUN
Frequenc
y
command
Multi-function
output MO=47
Frequency
command <02-33
48
Error PID Feedback of
Tension
When the error between PID target value and PID feedback
exceeds Pr.08-63 and allowance error detection time of
tension PID feedback exceeds Pr.08-64, please refer to Pr. 08-
64 for error treatment of tension PID feedback.
49 Reserved