



















Chapter 4 Parameters|
4-6 Revision August 2008, 03VE, SW V2.04
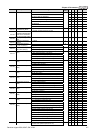
Group 2 Digital Input/Output Parameters
Pr. Explanation Settings
Factory
Setting
VF
VFPG
SVC
FOCPG
TQRPG
02-00 2-wire/3-wire Operation
Control
0: FWD/STOP, REV/STOP
1: FWD/STOP, REV/STOP (Line Start Lockout)
2: RUN/STOP, REV/FWD
3: RUN/STOP, REV/FWD (Line Start Lockout)
4: 3-wire (momentary push button)
5: 3-wire (momentary push button and Line Start
Lockout)
0
○ ○ ○ ○ ○
0: no function
○ ○ ○ ○ ○
1: multi-step speed command 1/multi-step position
command 1
○ ○ ○ ○
02-01 Multi-Function Input
Command 1 (MI1)
(it is Stop terminal for 3-
wire operation)
2: multi-step speed command 2/ multi-step position
command 2
1
○ ○ ○ ○
3: multi-step speed command 3/ multi-step position
command 3
○ ○ ○ ○
02-02
Multi-Function Input
Command 2 (MI2)
4: multi-step speed command 4/ multi-step position
command 4
2
○ ○ ○ ○
5: Reset
○ ○ ○ ○ ○
02-03
Multi-Function Input
Command 3 (MI3)
6: JOG command
3
○ ○ ○ ○
7: acceleration/deceleration speed inhibit
4
○ ○ ○ ○
02-04
Multi-Function Input
Command 4 (MI4)
8: the 1st, 2nd
acceleration/deceleration time selection
○ ○ ○ ○
9: the 3rd, 4th
acceleration/deceleration time selection
0
○ ○ ○ ○
02-05
Multi-Function Input
Command 5 (MI5)
10: EF input (07-36)
○ ○ ○ ○ ○
11: B.B. input
0
○ ○ ○ ○ ○
02-06 Multi-Function Input
Command 6 (MI6)
(specific terminal for
TRG)
12: Output stop
○ ○ ○ ○ ○
02-23 Multi-Function Input
Command 7
13: cancel the setting of the optimal
acceleration/deceleration time
0
○ ○ ○ ○
02-24 Multi-Function Input
Command 8
14: switch between drive settings 1 and 2
0
○ ○ ○ ○
02-25 Multi-Function Input
Command 9
15: operation speed command form AVI
0
○ ○ ○ ○
02-26 Multi-Function Input
Command 10
16: operation speed command form ACI
0
○ ○ ○ ○
02-27 Multi-Function Input
Command 11
17: operation speed command form AUI
0
○ ○ ○ ○
02-28 Multi-Function Input
Command 12
18: Emergency Stop (07-36)
0
○ ○ ○ ○ ○
02-29 Multi-Function Input
Command 13
19: Digital Up command
0
○ ○ ○ ○
02-30 Multi-Function Input
Command 14
20: Digital Down command
0
○ ○ ○ ○
21: PID function disabled
○ ○ ○ ○
22: clear counter
○ ○ ○ ○ ○
23: input the counter value (multi-function input
command 6)
○ ○ ○ ○ ○
24: FWD JOG command
○ ○ ○ ○
25: REV JOG command
○ ○ ○ ○
26: TQC+PG/FOC+PG model selection
○ ○
27: ASR1/ASR2 selection
○ ○
28: Emergency stop (EF1)
○ ○ ○ ○ ○
29: Signal confirmation for Y-connection
○ ○ ○ ○
30: Signal confirmation for Δ−connection
○ ○ ○ ○
31: High torque bias (by Pr.07-29)
○ ○ ○ ○ ○
32: Middle torque bias (by Pr.07-30)
○ ○ ○ ○ ○
33: Low torque bias (by Pr.07-31)
○ ○ ○ ○ ○
34: Enable multi-step position control
○ ○
35: Enable position control
○ ○
36: Enable position learning function (valid at stop)
○ ○
37: Enable pulse position input command
○ ○
38: Disable write EEPROM function
○ ○ ○ ○ ○
39: Torque command direction
○
40: Force stop
○ ○ ○ ○ ○
41: Serial position clock
○
42: Serial position input
○
43: Analog input resolution selection
○