


















Chapter 4 Parameters|
4-102 Revision August 2008, 03VE, SW V2.04
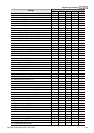
Control Mode
Settings
VF VFPG SVC FOCPG TQRPG
52: Password error (PcodE)
○ ○ ○ ○ ○
53: Reserved
54: Communication error (cE1)
○ ○ ○ ○ ○
55: Communication error (cE2)
○ ○ ○ ○ ○
56: Communication error (cE3)
○ ○ ○ ○ ○
57: Communication error (cE4)
○ ○ ○ ○ ○
58: Communication Time-out (cE10)
○ ○ ○ ○ ○
59: PU time-out (cP10)
○ ○ ○ ○ ○
60: Brake transistor error (bF)
○ ○ ○ ○ ○
61: Y-connection/Δ-connection switch error (ydc)
○ ○ ○ ○
62: Decel. Energy Backup Error (dEb)
○ ○ ○ ○ ○
63: Slip error (oSL)
○ ○ ○ ○
64: Broken belt error (bEb)
○ ○ ○ ○ ○
65: Error PID feedback signal of tension (tdEv)
○ ○ ○ ○ ○
It will record when the fault occurs and force stopping. For the Lv, it will record when it is
operation, or it will warn without record.
Setting 62: when DEB function is enabled, the drive will execute DEB and record to the Pr.06-
17 to Pr.06-22 simultaneously.
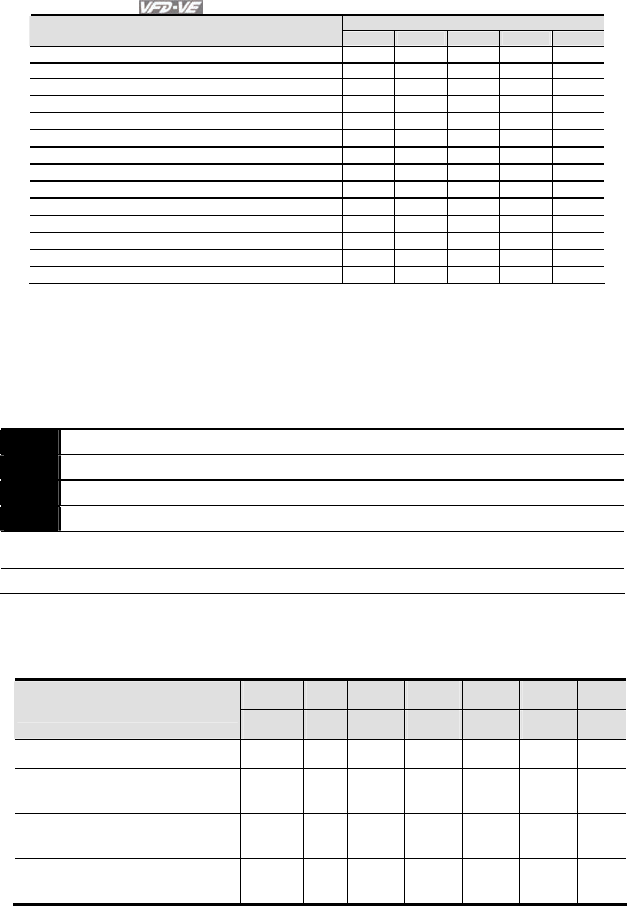
06-23 Fault Output Option 1 Unit: 1
06-24 Fault Output Option 2 Unit: 1
06-25 Fault Output Option 3 Unit: 1
06-26 Fault Output Option 4 Unit: 1
Control
mode
VF VFPG SVC FOCPG TQRPG
Factory Setting: 0
Settings 0 to 65535 sec (refer to bit table for fault code)
These parameters can be used with multi-function output (set Pr.02-11 to Pr.02-14 to 35-38)
for the specific requirement. When the fault occurs, the corresponding terminals will be
activated (It needs to convert binary value to decimal value to fill in Pr.06-23 to Pr.06-26).
Bit0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6
Fault code
current Volt. OL SYS FBK EXI CE
0: No fault
1: Over-current during acceleration
(ocA)
●
2: Over-current during deceleration
(ocd)
●
3: Over-current during constant
speed (ocn)
●