



















Chapter 4 Parameters|
4-150 Revision August 2008, 03VE, SW V2.04
Group 10 PID Control
10-00 Encoder Pulse Unit: 1
Control
mode
VFPG FOCPG TQRPG
Factory Setting: 600
Settings 1 to 20000 (Max=20000 for 2-pole motor)
A Pulse Generator (PG) or encoder is used as a sensor that provides a feedback signal of the
motor speed. This parameter defines the number of pulses for each cycle of the PG control.
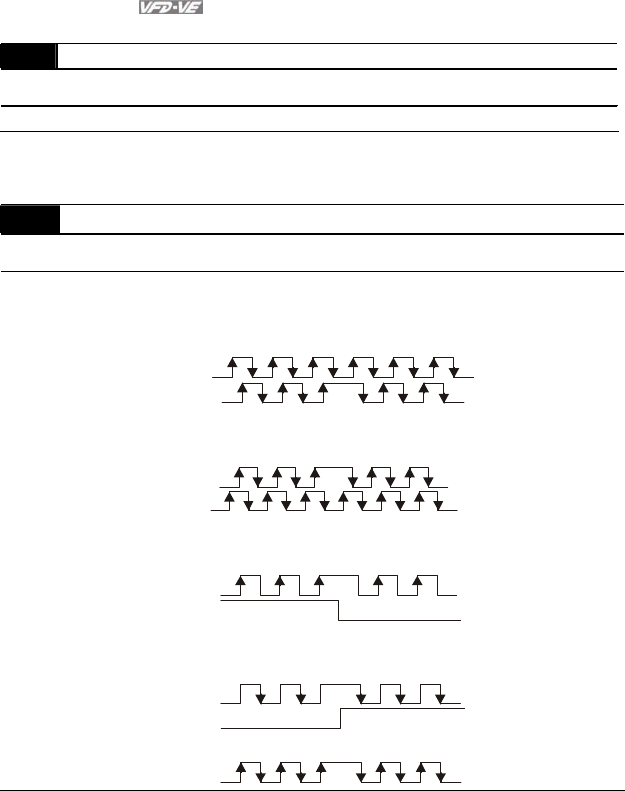
10-01
Encoder Input Type Setting
Control
mode
VFPG FOCPG TQRPG
Factory Setting: 0
Settings 0 Disable
1
Phase A leads in a forward run command and phase B leads in a
reverse run command
A
B
FWD
REV
2
Phase B leads in a forward run command and phase A leads in a
reverse run command
A
B
FWD
REV
3
Phase A is a pulse input and phase B is a direction input. (low
input=reverse direction, high input=forward direction)
A
B
FWD
REV
4
Phase A is a pulse input and phase B is a direction input. (low
input=forward direction, high input=reverse direction)
A
B
FWD
REV
5
Single-phase input
A
It is helpful for the stable control by inputting correct pulse type.