



















E6581381
F-25
6
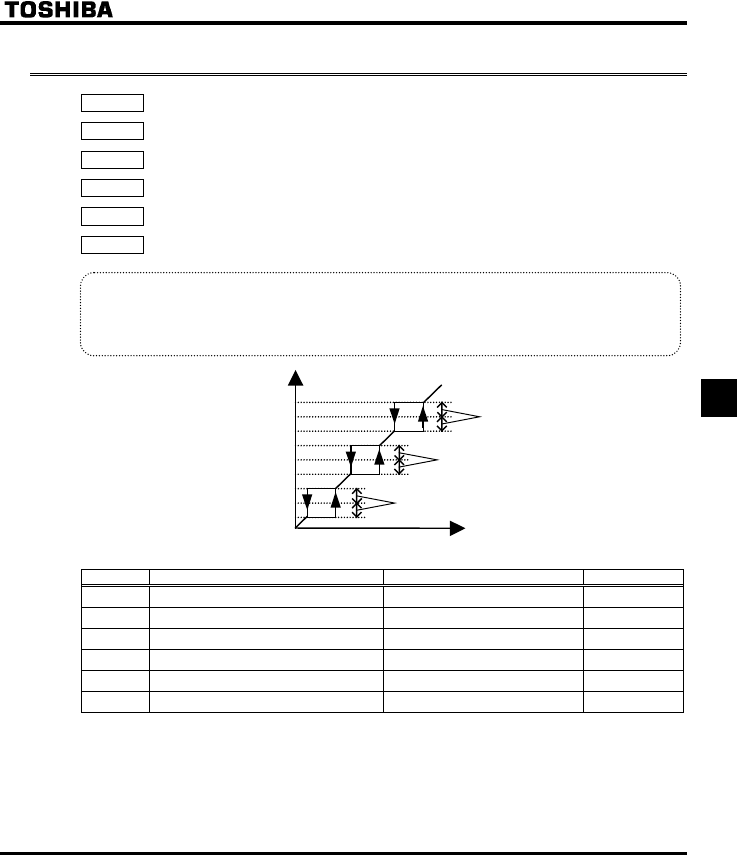
6.9 Jump frequency - jumping resonant frequencies
H : Jump frequency 1
H
: Jumping width 1
H
: Jump frequency 2
H
: Jumping width 2
H
: Jump frequency 3
H
: Jumping width 3
• Function
Resonance due to the natural frequency of the mechanical system can be avoided by jumping the
resonant frequency during operation. During jumping, hysteresis characteristics with respect to the jump
frequency are given to the motor.
Jumping width 1 (
H
)
Jumping width 2 (
H
)
Jumping width 3 (
H
)
Jump frequency 3(
H
)
Jump frequency 1 (
H
)
Jump frequency 2 (
H
)
Output command frequency
(Hz)
Frequency setting signal
0
[Parameter setting]
Title Function Adjustment range Default setting
H Jump frequency 1 0.0-HJ (Hz) 0.0
H Jumping width 1 0.0-30.0 (Hz) 0.0
H Jump frequency 2 0.0-HJ (Hz) 0.0
H Jumping width 2 0.0-30.0 (Hz) 0.0
H Jump frequency 3 0.0-HJ (Hz) 0.0
H Jumping width 3 0.0-30.0 (Hz) 0.0
+ Do not set the jump parameters, if multiple jump frequency setting width overlap.
+ During acceleration or deceleration, the jumping function is disabled for the operation frequency.