



















E6581381
F-47
6
[Selection 2: Setting vector control and manual tuning independently]
If an "GVP" tuning error is displayed during auto-tuning or when vector control characteristics are to be
improved, independent motor constants can be set.
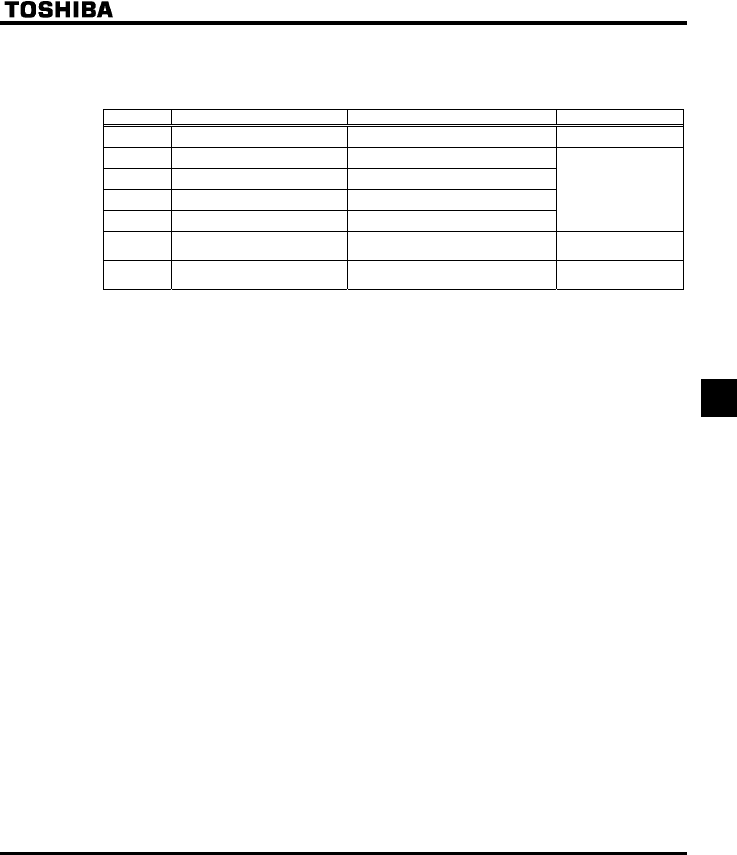
Title Function Adjustment range Default setting
H Slip frequency gain 0-150 (%) 50
H Automatic torque boost value 0.0-30.0 (%)
H Motor rated current 0.1-200.0 (A)
H Motor no-load current 10-100 (%)
H Motor rated rotational speed 100-15000 (min
-1
)
Depends on the
capacity
(
⇒ See page K-14)
H
Speed control response
coefficient
1-150 40
H
Speed control stability
coefficient
1-100 20
Setting procedure Adjust the following parameters:
H: Set the compensation gain for the slipping of the motor. A higher slip frequency reduces motor
slipping correspondingly. After setting H, set H to adjust in detail.
H: Adjust the primary resistive component of the motor. Use the auto-tuning value.
H: Set the rated current of the motor. For the rated current, see the motor's nameplate or test report.
H: Set the ratio of the no-load current of the motor to the rated current. Enter the value in % that is
obtained by dividing the no-load current specified in the motor's test report by the rated current.
H: Set the rated rotational speed of the motor. For the rated current, see the motor's nameplate or test
report.