



















CANopen Network Interface
1606218 02 08/2006 49
About CANopen
Introduction CANopen is a standard fieldbus protocol for industrial control systems. It is
particularly well suited to real-time PLCs, as it provides an effective, low-cost
solution for industrial applications.
The CANopen
Protocol
The CANopen protocol was created as a subset of CAL (CAN Application Layer). By
defining profiles, it is able to be even more specifically adapted to use with standard
industrial components. CANopen is a CiA standard (CAN in Automation) that was
very quickly adopted by users when it was put on the market. In Europe, CANopen
is now recognized as the industry standard for industrial systems based on a CAN
design.
Physical Layer CAN uses a differentially driven two-wire bus line (common return). A CAN signal is
the difference between the voltage levels of the CAN_H and CAN_L wires. (See
figure below.)
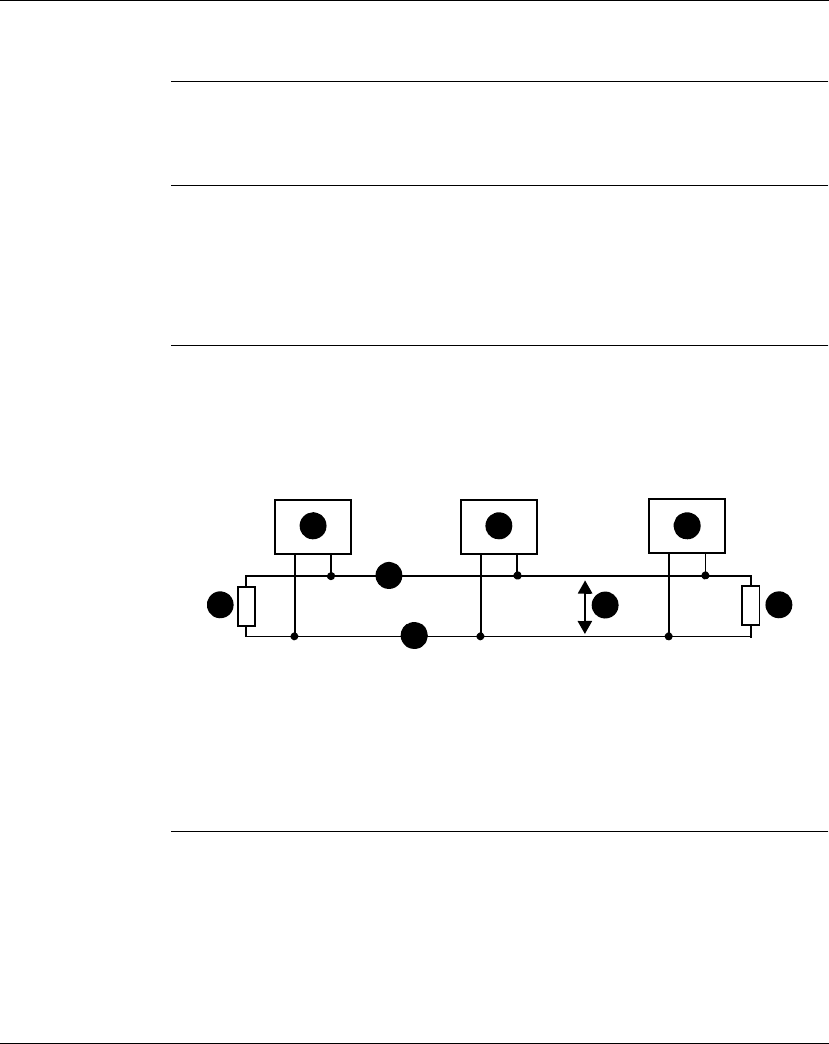
The following diagram shows the components of the physical layer of a two-wire
CAN bus:
1 CAN_H wire
2 CAN_L wire
3 Potential difference between CAN-H/CAN-L signals
4 Line terminator 120 Ω
5 Connected devices,
The bus wires can be routed in parallel, twisted or shielded form in accordance with
electromagnetic compatibility requirements.
3
555
1
2
44