



















CANopen Network Interface
58
1606218 02 08/2006
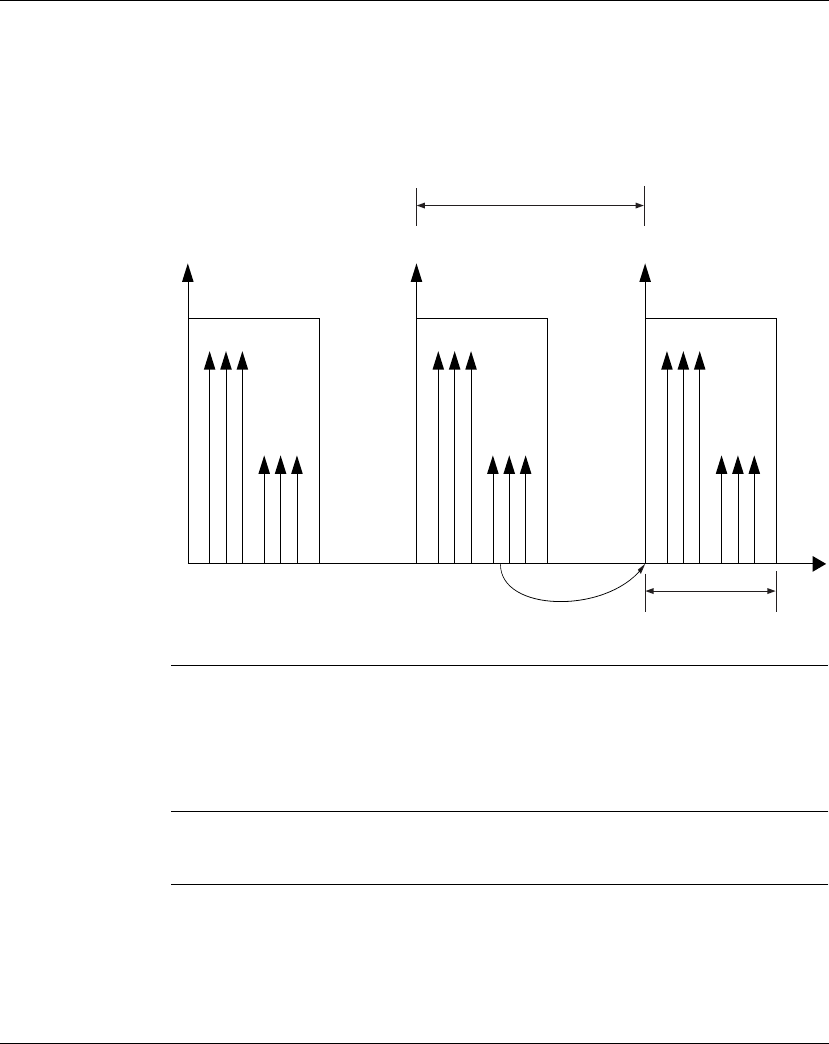
Synchronous
(mode 0 to 240)
For certain applications, synchronization between scanning of the inputs and
activation of the outputs may be necessary.
For this reason, CANopen provides the "SYNC" object, a high-priority CAN message
without any working data, which, when it is received by the synchronized devices is
used to trigger the reading of inputs or activation of outputs (Trigger).
The following diagram shows the time data for synchronized PDO transmission.
Synchronous
RTR (mode 252)
Aside from polling by request ("timing-related polling"), the slaves can also be polled
by the master by using data request messages ("Remote-Frames", known as RTR
messages).
In mode 252, the device uses the synchronization message to trigger transmission
of the PDO once it has received the RTR message.
Asynchronous
RTR (mode 253)
In mode 253, the TPDOs are transmitted once the RTR message is received.
SYNC SYNC SYNC
Synchronous
window length
Communication cycle
Current input data
Set point
Output
Data
Input search in each SYNC
message
Actuation based on outputs
at next SYNC message