



















8-14
DrvGII PC Utility
8
8.4.2 Servo Tuning
This menu allows you to adjust the servo parameters of the motor through auto-tuning and manual tuning in
addition to adjust various compensation filters
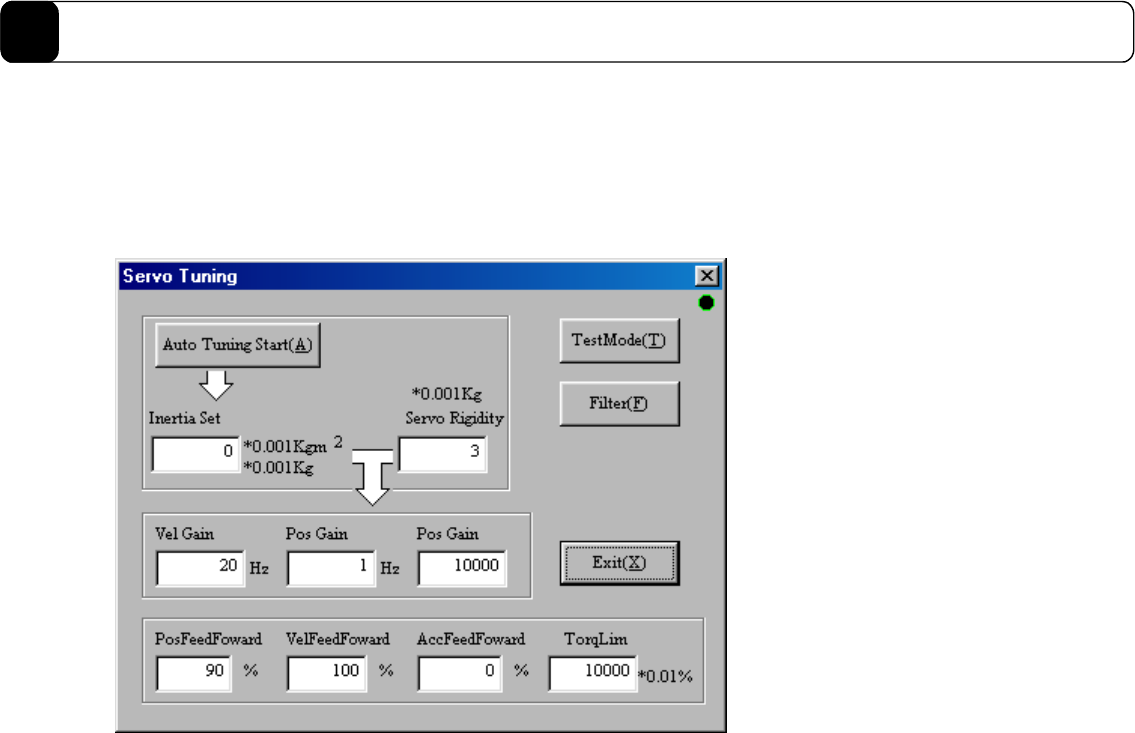
Click “Servo Cntl (S)” on “MainMenu” to display the “Servo Tuning” dialog box.
Figure 8.16 “Servo Tuning” dialog box
(1) Auto-tuning
1) Set the operation mode to the RS232C operation enable mode, and then turn on the power (see Chapter 5).
2) Set the motor to Servo ON (the operations until this point must be made before opening the “Servo Tuning”
dialog box.)
3) Click “Auto Tuning (A)” to start the auto-tuning.
Note: The motor performs reciprocating movements in order to estimate the inertia and weight of the load (the
operation width of the reciprocating movement can be changed in parameter <#32>). Please make sure
that there are no interfering objects within the range of the operation width.
4) After performing reciprocating movement for several times, the estimation of the inertia and weight is
completed and reflected in the parameter for inertia/weight.
* By changing the servo stiffness setting parameter, three parameters – the velocity control bandwidth, position
control bandwidth, and position control integral limiter – are changed and thus the servo stiffness changes.
(2) Manual tuning
1) Set the operation mode to the RS232C operation enable mode, and then turn on the power (see Chapter 5).
2) Set the motor to Servo ON (the operations until this point must be made before opening the “Servo Tuning”
dialog box.)
3) Click “Test Mode (T)” to enter the test mode.
Note: The motor performs small width reciprocating movements (the operation width of the reciprocating
movement can be changed in parameter <#32>). Please make sure that there are no interfering objects in
the range of the operation width.
4) In the test mode, the driver monitors the waveform of the motor position by oscilloscope, etc., and
manipulates three parameters – the velocity control bandwidth, position control bandwidth, and position
control integral limiter – to tune the servo (see Chapter 5 for more details).