



















7-6
RS232C Interfaces
7
7.4 @ Commands
@
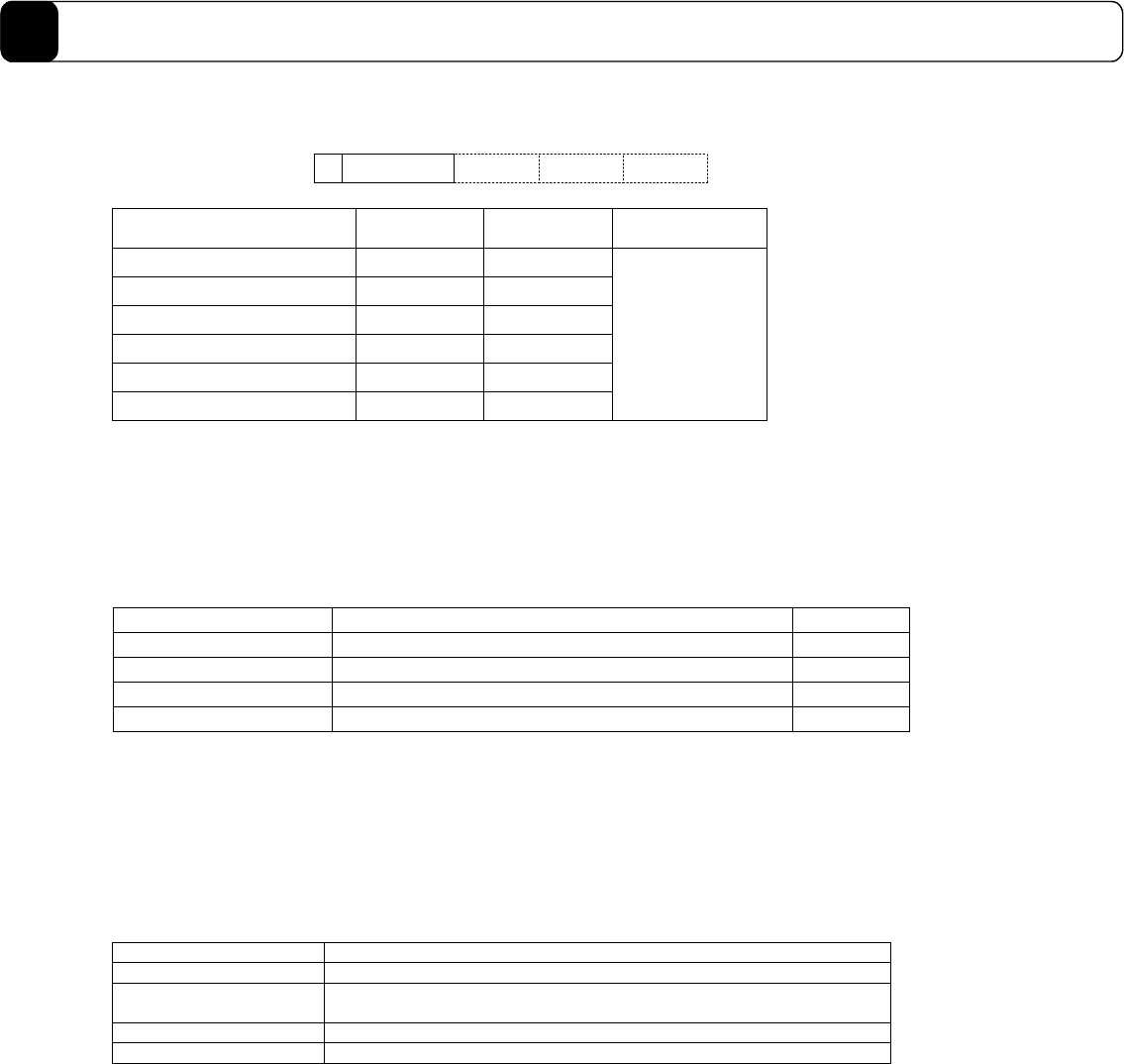
: Field 0Command format
Command
number
: Field 1
...
: Field 2
Command name Command No. No. of fields
Response at
normal operation
Abort 1 0
Stop 2 0
Start 3 1
Error reset 4 0
Homing offset position setting 10 0
Jog move command 11 1
R00
7.4.1 Start @3: Field 0
Start commands begin operating actions other than jog moves. For argument 0, set a numeric value
corresponding to the content of the operation to be performed.
A response is issued when the corresponding operation is complete. In case of operations that do not end by
themselves, such as test operations, perform the next operation without waiting for the response.
Operating action name Command No. of fields
Test operation @3:0 1
Auto-tuning operation @3:1 1
Homing move @3:3 1
Mechanical setting mode @3:15 1
7.4.2 Stop @2
Stop commands are used to end operating actions other than jog moves. They can be issued via the RS232C
interface when the setting of the operation mode has given the main operation authority to the RS232C interface.
The driver’s response to stop commands varies depending on the current operating action. Refer to the table
below.
The response is issued immediately.
Operating action name Driver response
Test operation Ends the operation when the motor returns to the start position.
Auto-tuning operation Ends the operation when the oscillation command to the motor is
completed.
Homing move Immediately decelerate and stop the move, and ends the operation.
Mechanical setting mode Invalid because this operation cannot be completed (ignored).
7.4.3 Abort @1
The abort command stops operating actions other than jog moves. It functions irrespectively of the operation
mode.
Unlike with the stop commands, the motor immediately decelerates and stops, and the operating action is ended
even during an operation that involves movement. When the M function is being executed, the abort command
stops the execution and ends the operating action.
The response is issued immediately.
7.4.4 Error reset @4
The error reset command cancels error statuses of the driver. It functions irrespectively of the operation mode. It
can only be run while in the idle status.
Depending on the error content, there are errors that cannot be canceled or errors that cause the same errors again
immediately after being canceled.
The response is issued immediately.