



















6-7
6.4 Operations
6.4.1 Starting an Operation
The operation start command via MODE_START instructs the start of operations other than jog moves.
The operation start command is issued when the status is 1.
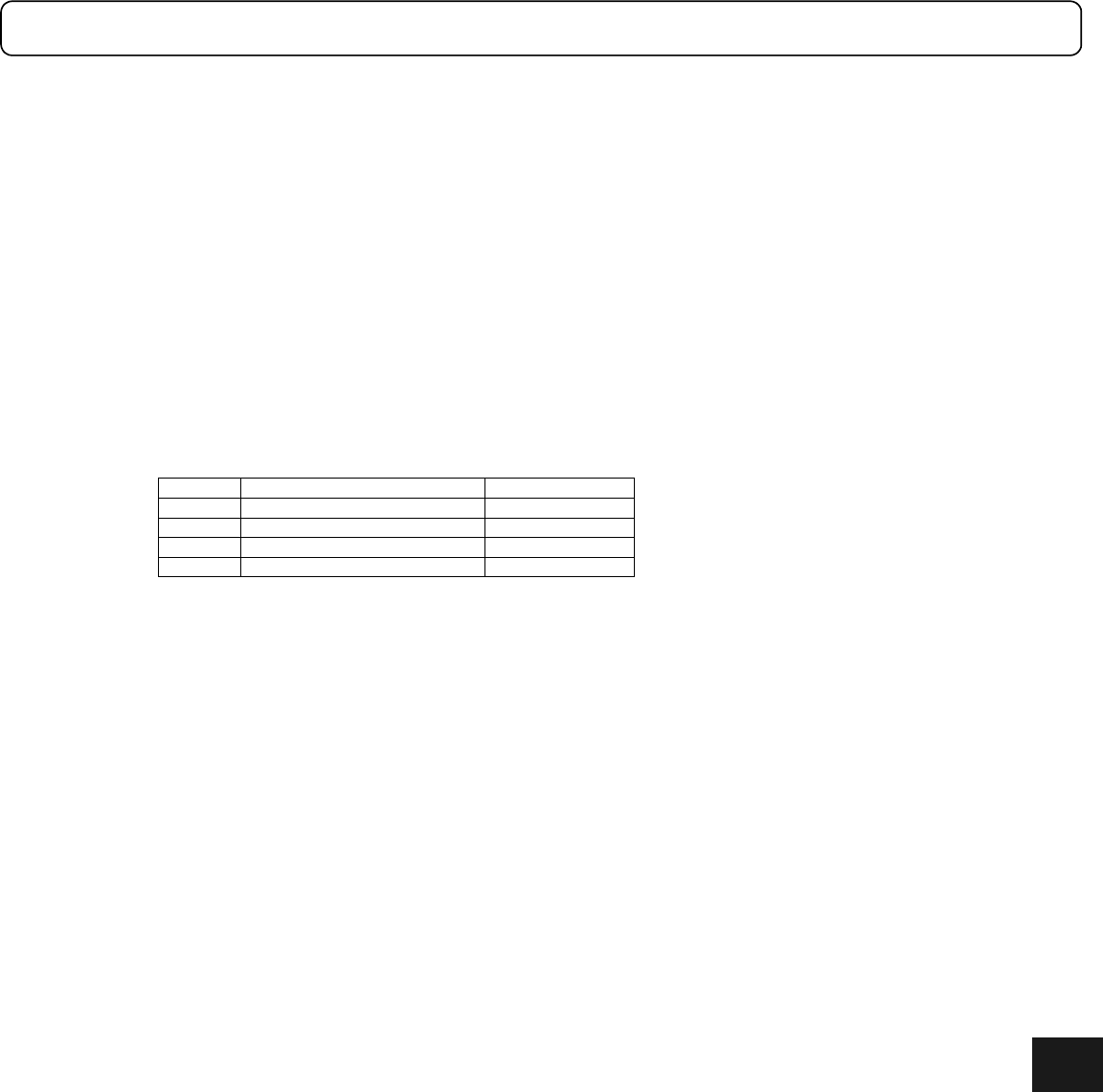
MODE[1..0] must set the number of the operation to be performed when the operation start command is issued
via MODE_START. See the table below.
In addition, the value set by MODE[1..1] is read and processed 10ms after the operation start command is issued.
Therefore, if deviation in time between outputs by the controller is within several msec, the motor can be started
normally by setting the time earlier than the time of the operation start command issuance via MODE_START.
However, note that the dead time for issuing the operation start command will be added to this duration (10ms).
The total dead time until the motor starts operating is thus 10ms (scan time) + 10ms (read delay) + internal delay
time.
The BUSY output retains the executing status even when an operation ends while MODE_START is giving a
command (while in status 1) after an operation is started.
No. Name End type
0 Test operation Non-self-end
1 Auto-tuning operation Self-end
2 (Reserved)
3 Homing move Self-end
6.4.2 Aborting an Operation
The operation abort command via MODE_ABORT stops operations other than jog moves.
The operation abort command is issued when the status is 1.
The motor immediately decelerates even during an operation involving a move, and ends the operation.
6