



















5-11
5.4.1 Velocity Control Part
For the velocity control bandwidth, either the value set with the #51 Velocity control bandwidth 1 parameter or
the #49 Velocity control bandwidth 2 parameter is selected, according to the status of the controller interface
input signal IN_GAIN. The selected value is displayed in the #376 Velocity control bandwidth monitor.
The velocity control part calculates the #361 Velocity proportional gain monitor value from the #155 Load
inertia/load mass parameter value, which is either measured and set by an auto-tuning operation or entered
directly as a numerical value, according to the velocity control bandwidth value. During this process, the
frequency characteristics of neither the velocity feedback filter nor the notch filter are considered but only the
frequency characteristic of the first order delay compensation device is considered to calculate the velocity
proportional gain.
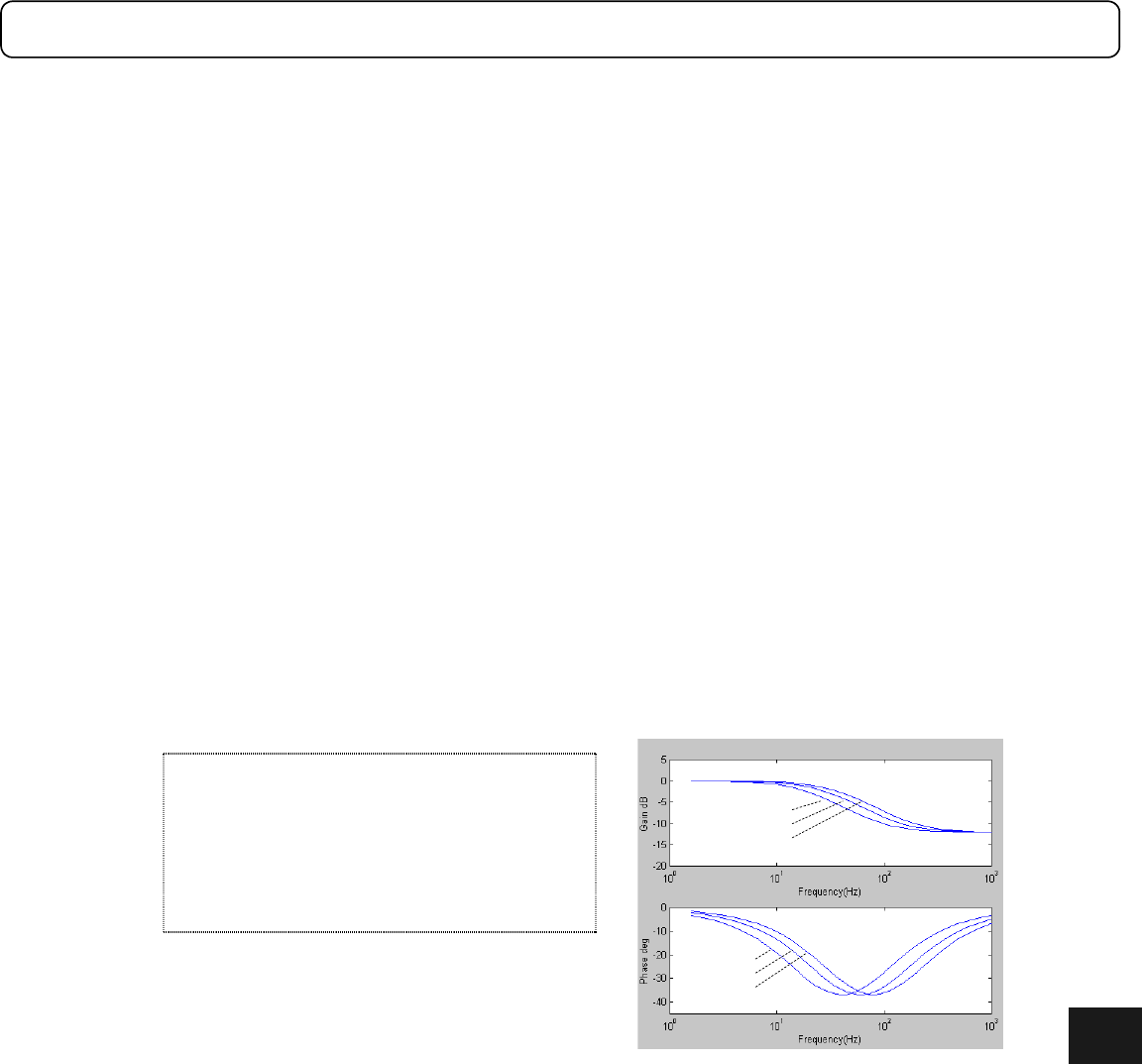
The first order compensation device can be set in four ways via the #152 First order delay compensation
device setting parameter. The first order delay compensation device has the effect that it improves the gain
characteristics of the velocity control part. The frequency characteristics for each setting of the first order
compensation device is shown below. Note that there is no frequency dependency when the first order
compensation is not set.
There are two channels available for the notch filter (optional). The central frequency value can be set
independently for each channel via the #153 Notch filter: Frequency selection 1 and #154 Notch filter:
Frequency selection 2 parameters. The notch filter has the effect that it improves the gain characteristics of
mechanical systems that tend to resonate.
The velocity feedback filter can be enabled or disabled by setting the #219 Enable/Disable velocity feedback
filter parameter. When enabled, the filter bandwidth can be set in the #220 Velocity feedback filter bandwidth
parameter. The velocity feedback filter is effective in eliminating noise at motor operation, but with a small
bandwidth the velocity control part tends to oscillate.
The filter bandwidth of the velocity command filter can be set in the #221 Velocity command filter bandwidth
parameter. The velocity command filter helps achieving smoother acceleration/deceleration, but with a small
bandwidth the position control part tends to oscillate.
[Related parameters]
#51 Velocity control bandwidth
#152 First order delay compensation device setting
#153 Notch filter: Frequency selection 1
#154 Notch filter: Frequency selection 2
#155 Load inertia/load mass
#219 Enable/Disable velocity feedback filter
#220 Velocity feedback filter bandwidth
#221 Velocity command filter bandwidth
[Frequency characteristics of the first order
delay compensation device]
20Hz/80Hz
30Hz/120Hz
40Hz/160Hz
20Hz/80Hz
30Hz/120Hz
40Hz/160Hz
5