



















E6580757
F-20
6
[Parameter setting]
Title Function Adjustment range Default setting
Jog run frequency
0.0 ∼ 20.0 (Hz)
0.0
Jog run stopping pattern
0: Slowdown stop
1: Coast stop
2: DC braking
0
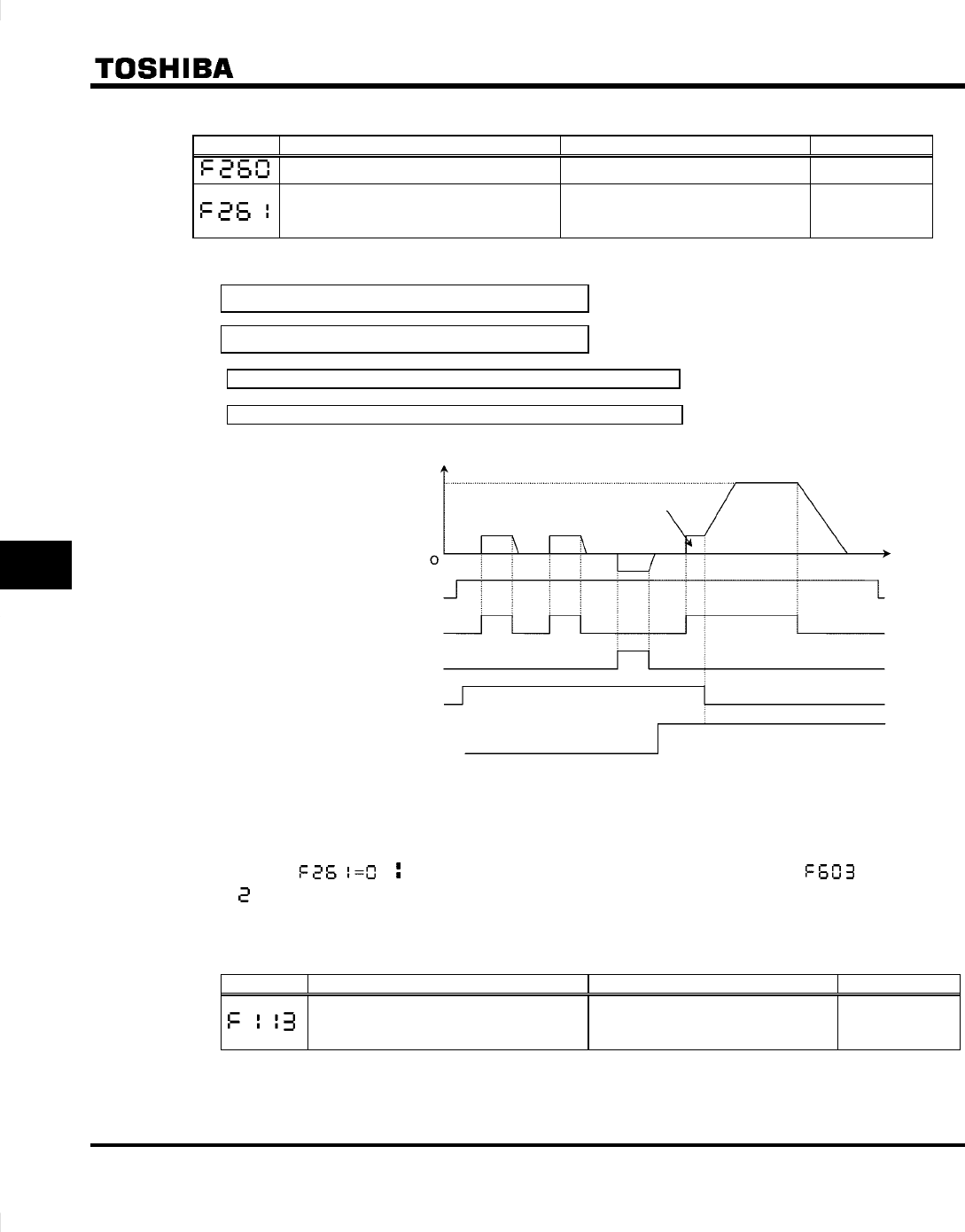
<Examples of jog run>
RST-CC (JOG) ON + F-CC ON: Forward jog run
RST-CC (JOG) ON + R-CC ON: Reverse jog run
( Normal operation frequency signal input + F-CC ON: Forward run )
( Normal operation frequency signal input + R-CC ON: Reverse run
)
Output frequency [Hz]
Set frequency
Forward
ST-CC
Normal operation frequency
setting signal input
Reverse
Forward
Forward
F-CC
R-CC
RST-CC
• The jog run setting terminal (RST-CC) is enabled when the operation frequency is below the jog run fre-
quency. This connection does not function at an operation frequency exceeding the jog run frequency.
• The motor can be operated in jog mode while the jog run setting terminals are connected (RST-CC ON).
• Jog run has priority, even when a new operation command is given during operation.
• Even for
or , an emergency DC braking becomes enabled when setting parameter to
.
[Setting of jog run setting terminal (RST-CC)]
Assign control terminal RST ([4: reset signal] in default setting) as the jog run setting terminal.
Title Function Adjustment range Default setting
Input terminal selection (RST)
0 ∼ 51
4
(jog run setting
terminal)
Note: During the jog run mode, there is LOW (low speed detection signal) output but no RCH (designated
frequency reach signal) output, and PID control does not work.