



















E6580757
F-21
6
6.9 Jump frequency - jumping resonant frequencies
: Jump frequency 1
: Jumping width 1
: Jump frequency 2
: Jumping width 2
: Jump frequency 3
: Jumping width 3
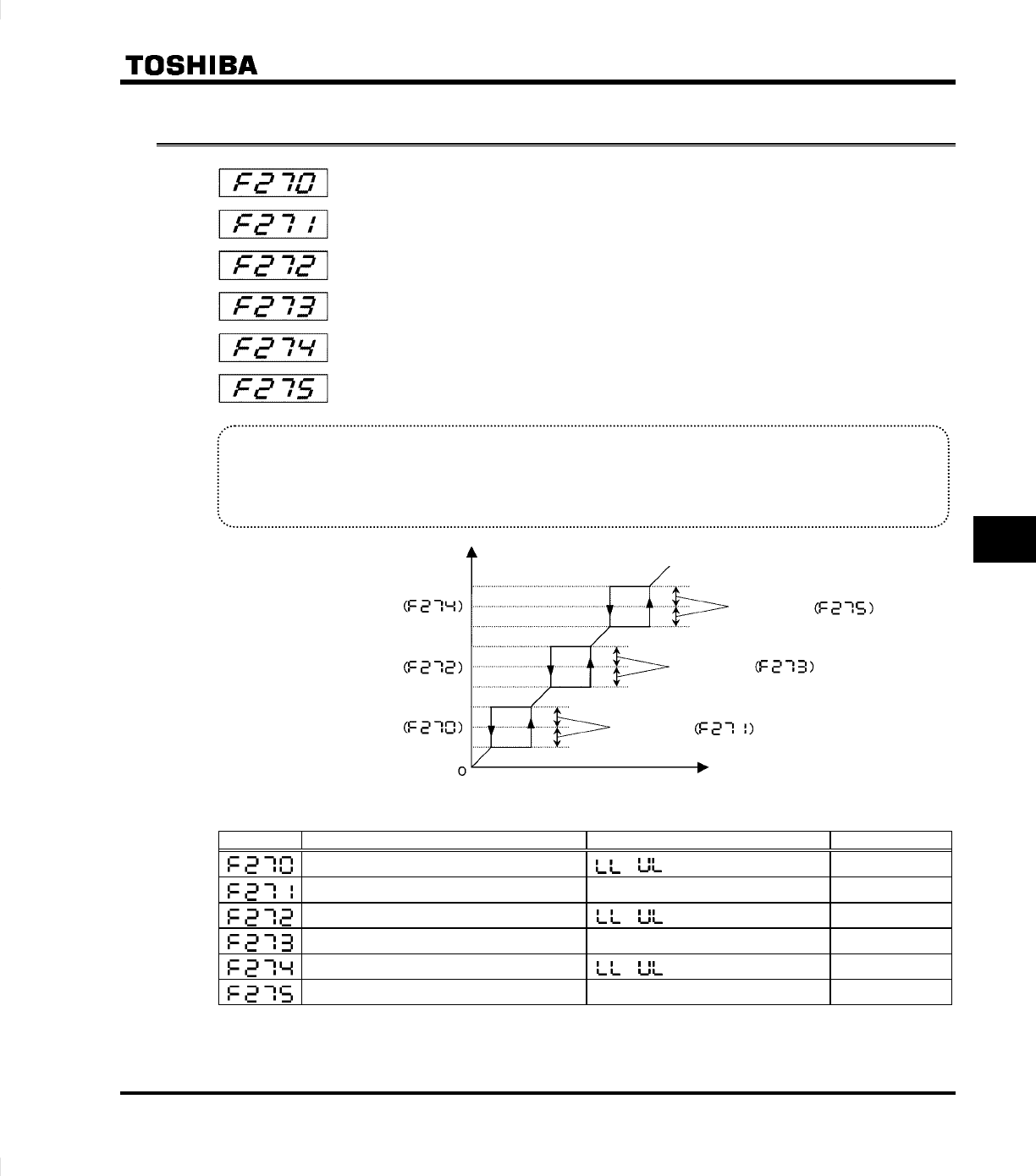
• Function
Resonance due to the natural frequency of the mechanical system can be avoided by jumping the reso-
nant frequency during operation. During jumping, hysterisis characteristics with respect to the jump fre-
quency are given to the motor.
Output frequency [Hz]
Jump frequency 1
Jumping width 3
Frequency setting signal
J
ump frequency 3
Jump frequency 2
Jumping width 2
Jumping width 1
[Parameter setting]
Title Function Adjustment range Setting
Jump frequency 1
∼ (Hz)
0.0
Jumping width 1
0.0 ∼ 30.0 (Hz)
0.0
Jump frequency 2
∼ (Hz)
0.0
Jumping width 2
0.0 ∼ 30.0 (Hz)
0.0
Jump frequency 3
∼ (Hz)
0.0
Jumping width 3
0.0 ∼ 30.0 (Hz)
0.0
✩ Do not set the jump parameters, If multiple jump frequency setting width overlap.
✩ During acceleration or deceleration, the jumping function is disabled for the operation frequency.