



















E6581528
E-35
5
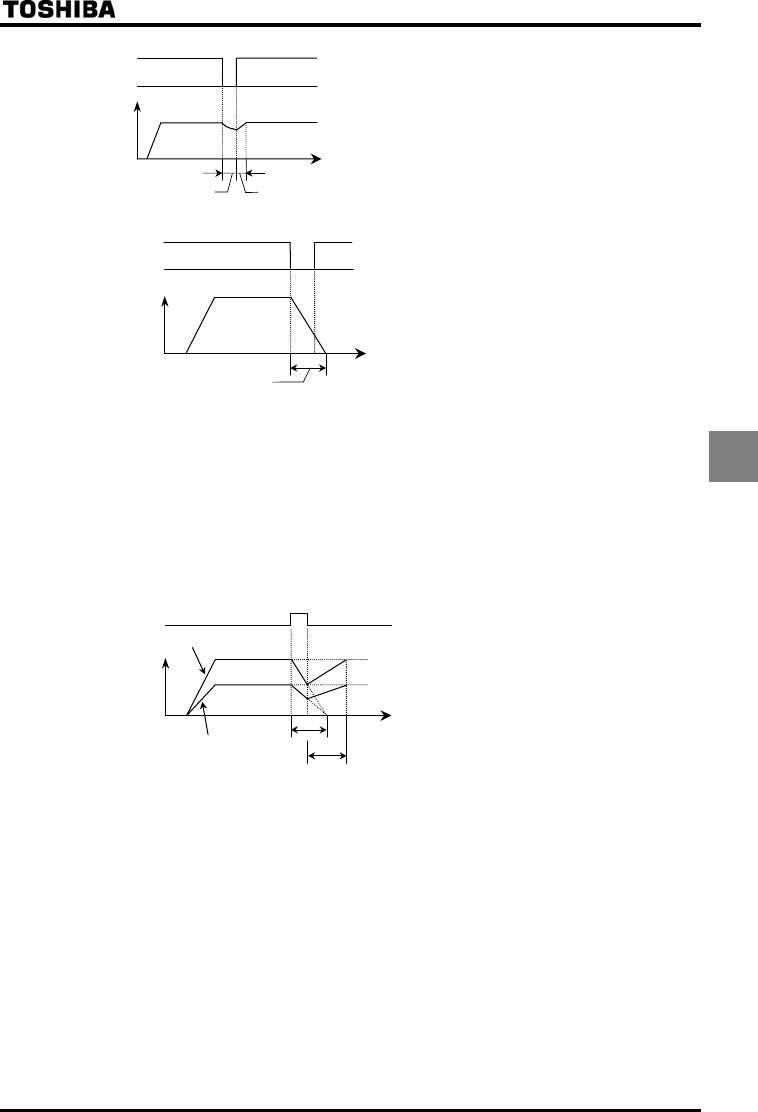
[If momentary power failure occurs]
Motor s
p
eed
Input voltage
Non-sto
p
control Normal acceleration
An example of setting when =
Motor speed
Time
In
p
ut volta
g
e
Deceleration stop
• Even after the recovery from an input power failure, the motor continues slowing down to a stop. If the voltage in the
inverter main circuit falls below a certain level, however, control will be stopped and the motor will coast.
• The deceleration time varies according to the setting of . In this case, the deceleration time refers to the
time elapsed before a motor running at (maximum frequency) comes to a full stop.
• A motor coasts when the voltage in the inverter is becoming or less.
The display alternately lights "" and continues the coasting state of the motor even though power
supply is recovered.
An example of setting when = (when the function of receiving synchronized acceleration/deceleration
signals is assigned to the input terminal S1)
(Input terminal function selection 5 (S1)) = (Synchronized acceleration/deceleration signal)
Motor speed
Time
Synchronized
acceleration/decel
eration signal
(S1 terminal)
Inverter 1
Inverter 2
ON
• If the parameters , are set for same acceleration and deceleration time and if synchronized
acceleration/deceleration signals set using the input terminal functions (, ) are used, multiple motors can be
stopped at about the same time or speed commands can be issued to them at about the same time.
• If a synchronized acceleration/deceleration signal is impressed, the synchronized deceleration function decreases
the output frequency to 0Hz to decelerate the motor linearly within the time specified with . (The S-pattern
operation function or the braking sequence cannot be used along with this function.)
When the motor comes to a full stop, the message “STOP” appears on the display panel.
• If the synchronized acceleration/deceleration signal is canceled during synchronized deceleration, the synchronized
acceleration function increases the output frequency to the frequency at the start of synchronized deceleration or to
the command frequency, whichever is lower, to accelerate the motor linearly within the time specified with .
(The S-pattern operation function, the braking sequence or the auto-tuning function cannot be used along with this
function.)
When acceleration is started, the message “STOP” on the display panel disappears.
• If a forward/reverse switching command or a stop command is issued during synchronized acceleration or
deceleration, synchronized acceleration or deceleration will be canceled.