



















E6581528
F-29
6
6. 17 Braking function
: Braking mode selection
: Load portion torque input
selection
: Hoisting torque bias input
:
Lowering torque bias multiplier
: Brake release time
: Creeping frequency
: Creeping time
: Braking time learning function
• Function
These parameters can be used as brake sequences for lifts and similar equipment.
To ensure smooth operation, the motor produces enough torque before the brake is released.
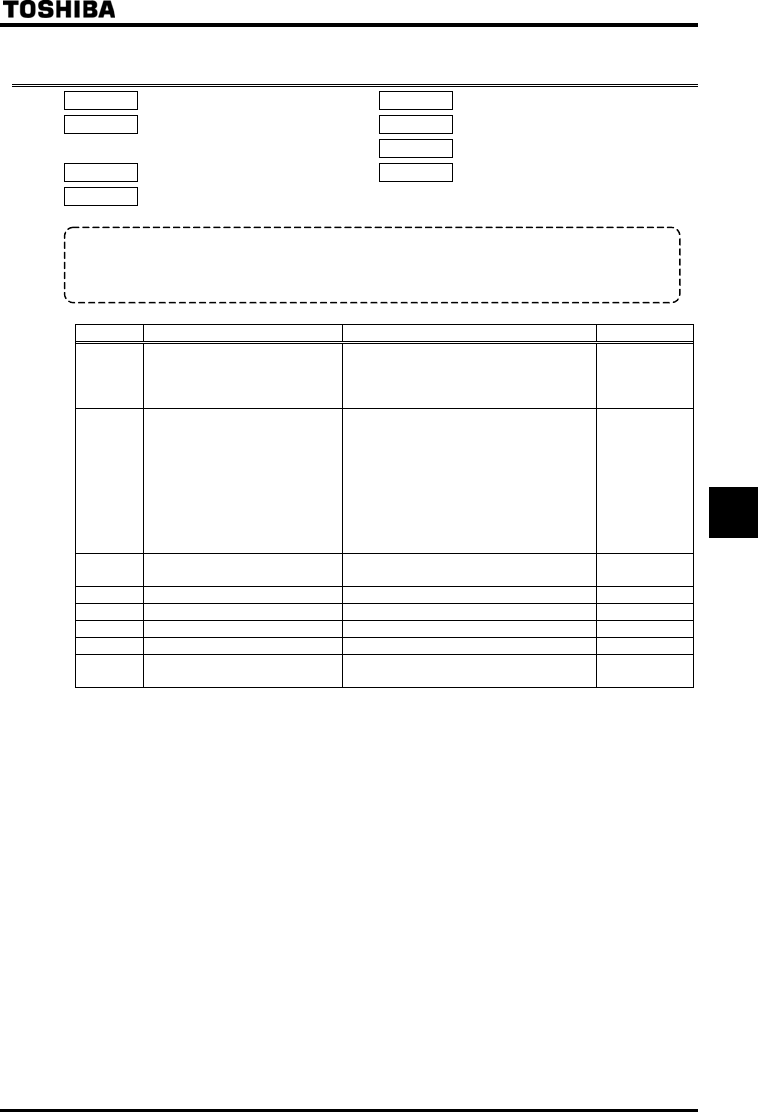
Title Function Adjustment range Default setting
Braking mode selection
:Disabled
:Forward winding up
:Reverse winding up
:Horizontal operation
Load portion torque input
selection
:Disabled
:VI/II (voltage/current input)
:RR/S4 (potentiometer/voltage input)
:RX (voltage input)
: enabled
:2-wire RS485 input enabled
:4-wire RS485 input enabled
:Communications option input enabled
:Optional AI1 (differential current input)
Hoisting torque bias input (valid
only when =)
-~ %
Lowering torque bias multiplier ~ %
Brake release time ~ sec.
Creeping frequency ~ Hz
Creeping time ~ sec.
Braking time learning function
:Disabled
:Brake signal learning (0 after adjustment)
Starting procedure
At the run command, the inverter makes the motor produce the torque specified with parameter . As soon
as a torque output command is issued, a brake release request signal is put out through the brake output terminal.
Upon expiration of the brake release time set with , the motor starts to accelerate.