





E6581528
11
K-10
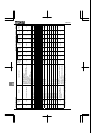
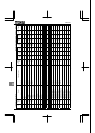
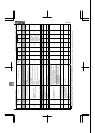
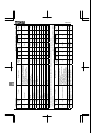
[7] Operation frequency Sensorless vector/vector with sensor (●:Effective, -:Ineffective)
Default setting
Vector control
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
=
500V
-50Hz
=
575V
-60Hz
=
690V
-50Hz
Write
during
running
Speed
control
Torque
control
V/f
Constant
Reference
0240 Starting frequency setting 0.0~10.0Hz 0.1/0.01 0.1 0.1 0.1 Enabled ●/● - ● 6. 7. 1
0241 Operation start frequency 0.0~ Hz 0.1/0.01 0.0 0.0 0.0 Enabled ●/● - ● 6. 7. 2
0242
Operation start frequency
hysteresis
0.0~30.0Hz 0.1/0.01 0.0 0.0 0.0 Enabled ●/● - ● 6. 7. 2
0243 Stop frequency setting 0.0~30.0Hz 0.1/0.01 0.0 0.0 0.0 Enabled ●/● - ● 6. 7. 1
0244
Frequency command dead
band
0.0~5.0Hz 0.1/0.01 0.0 0.0 0.0 Enabled ●/● - ● 6. 7. 3
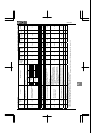
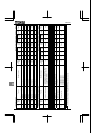
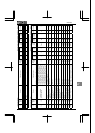
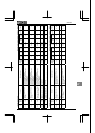
[8] DC braking Sensorless vector/vector with sensor (●:Effective, -:Ineffective)
Default setting
Vector control
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
=
500V
-50Hz
=
575V
-60Hz
=
690V
-50Hz
Write
during
running
Speed
control
Torque
control
V/f
Constant
Reference
0250 DC braking start frequency 0.0~120.0Hz 0.1/0.01 0.0 0.0 0.0 Enabled ●/● - ● 6. 8. 1
0251 DC braking current 0~100% 1/1 50 50 50 Enabled ●/● - ● 6. 8. 1
0252 DC braking time 0.0~20.0 sec. 0.1/0.1 1.0 1.0 1.0 Enabled ●/● - ● 6. 8. 1
0253
Forward/reverse DC braking
priority control
0:Disabled, 1:Enabled 1/1 0 0 0 Enabled ●/● - ● 6. 8. 1
0254 Motor shaft fixing control 0:Disabled, 1:Enabled 1/1 0 0 0 Enabled ●/● - ● 6. 8. 2
0255
0Hz command output
selection
0:Default (DC braking)
1:0Hz command
1/1 0 0 0 Enabled -/● - ● 6. 8. 3
0256
Time limit for lower-limit
frequency operation
0.0:Disabled
0.1~600.0 sec.
0.1/0.1 0.0 0.0 0.0 Enabled ●/● ●/● ● 6. 9
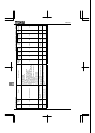
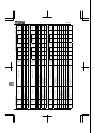
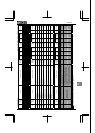
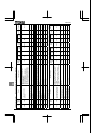
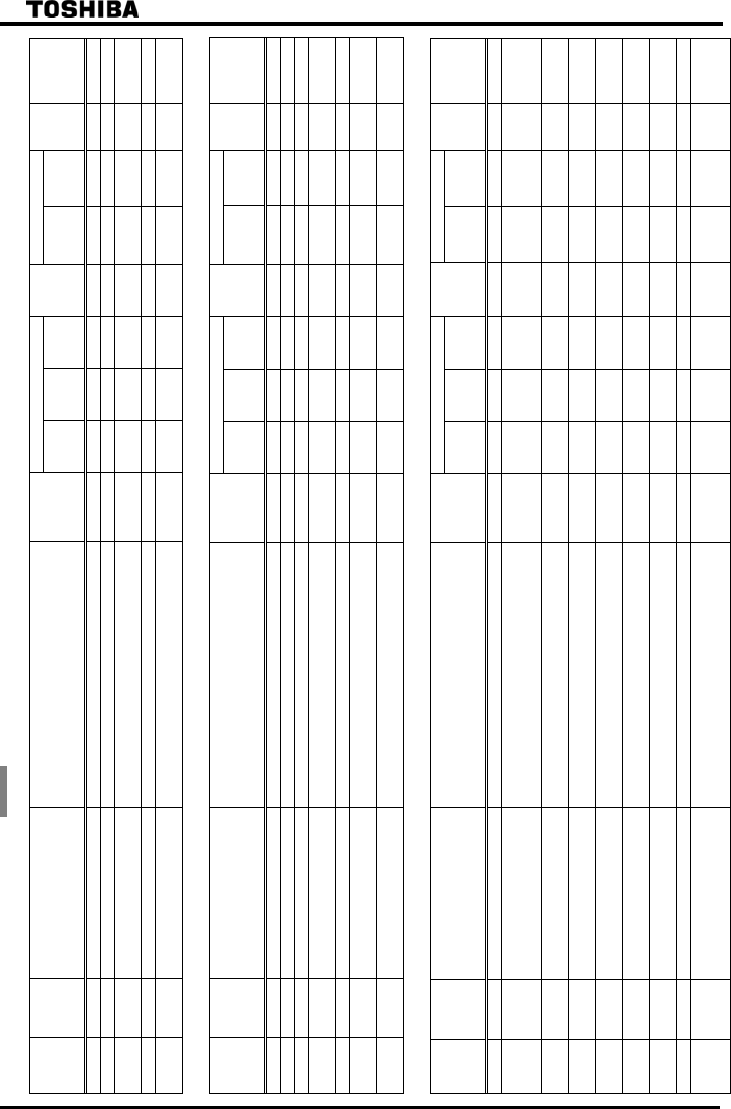
[9] Jogging operation Sensorless vector/vector with sensor (●:Effective, -:Ineffective)
Default setting
Vector control
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
=
500V
-50Hz
=
575V
-60Hz
=
690V
-50Hz
Write
during
running
Speed
control
Torque
control
V/f
Constant
Reference
0260 Jog run frequency ~20.0Hz 0.1/0.01 5.0 5.0 5.0 Enabled ●/● - ● 6. 10
0261 Jog run stop pattern
0:Deceleration stop
1:Coast stop
2:DC braking stop
1/1 0 0 0 Disabled ●/● - ● 6. 10
0262 Operation panel jog run mode
0:Disabled
1:Operation panel jog run mode enabled
1/1 0 0 0 Enabled ●/● - ● 6. 10
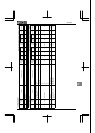
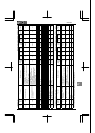
0264
Input from external contacts -
UP response time
0.0~10.0 sec. 0.1/0.1 0.1 0.1 0.1 Enabled ●/● - ● 6. 11
0265
Input from external contacts -
UP frequency step
0.0~ Hz 0.1/0.01 0.1 0.1 0.1 Enabled ●/● - ● 6. 11
0266
Input from external contacts -
DOWN response time
0.0~10.0 sec. 0.1/0.1 0.1 0.1 0.1 Enabled ●/● - ● 6. 11
0267
Input from external contacts -
DOWN frequency step
0.0~ Hz 0.1/0.01 0.1 0.1 0.1 Enabled ●/● - ● 6. 11
0268 Initial UP/DOWN frequency ~ Hz 0.1/0.01 0.0 0.0 0.0 Enabled ●/● - ● 6. 11
0269
Initial up/down frequency
rewriting
0:Not changed
1:Setting of changed when power is
turned off
1/1 1 1 1 Enabled ●/● - ● 6. 11