



















E6581528
G-4
7
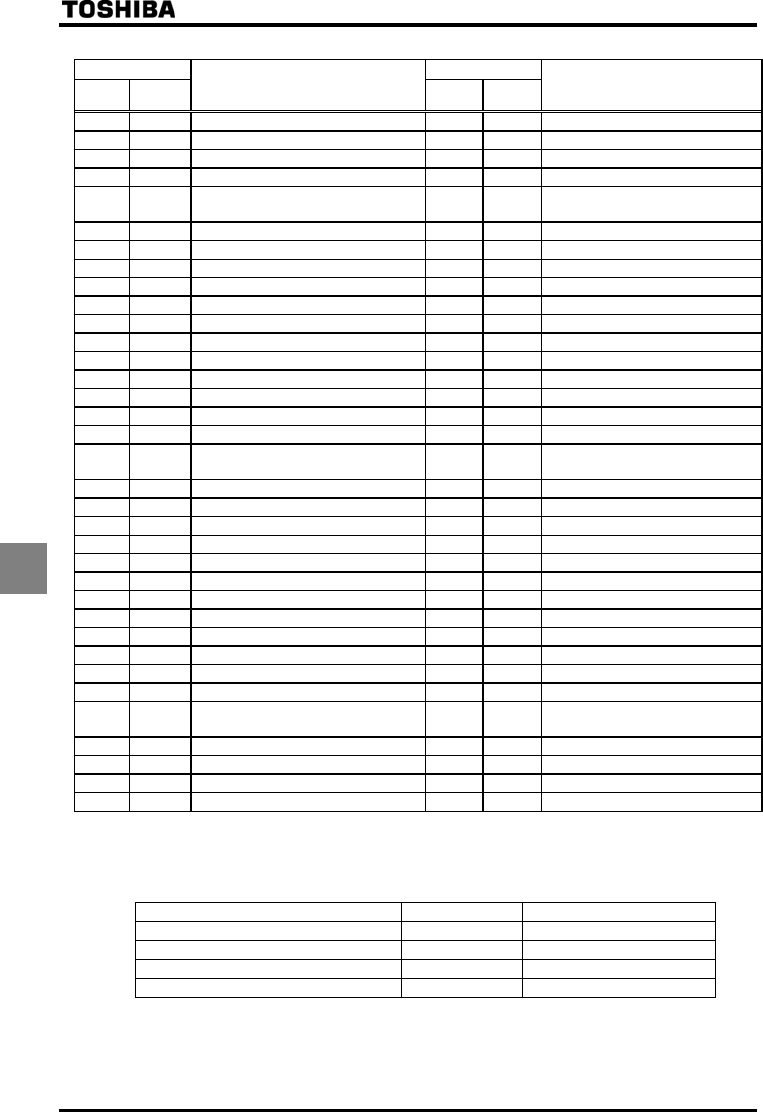
Table of setting of contact input terminal function
Parameter setting Parameter setting
Positive
logic
Negative
logic
Function
Positive
logic
Negative
logic
Function
No function is assigned Servo lock signal
F: Forward run command Simple positioning (positioning loop)
R: Reverse run command
Integrating wattmeter display clear
ST: Standby Trace back trigger signal
RES: Reset
Light-load high-speed operation
prohibitive signal
S1: Preset speed 1 No function assigned
S2: Preset speed 2 No function assigned
S3: Preset speed 3 No function assigned
S4: Preset speed 4 Binary data write
Jog run Up/down frequency (up) *1
Emergency stop Up/down frequency (down) *1
DC braking Up/down frequency (clear)
Acceleration/deceleration switching 1 *2 No function assigned
Acceleration/deceleration switching 2 *2 No function assigned
V/f switching signal 1 *2 Forward/reverse selection
V/f switching signal 2 *2 Run/stop command *3
Torque limit switching signal 1 *2 Commercial power/INV switching
Torque limit switching signal 2 *2
Frequency reference priority
switching
PID control OFF selection VI/II terminal priority
Pattern operation group 1 Command terminal board priority
Pattern operation selection 2 Permission of parameter editing
Pattern operation continuation signal Speed/Torque switching
Pattern operation trigger signal No function assigned
External thermal error No function assigned
Communication priority cancel
No function assigned
HD operation retention No function assigned
PID differentiation/integration clear Rapidest deceleration command
PID forward/reverse switching Preliminary excitation *4
Forced continuous operation Braking request
Specified speed operation No function assigned
Acceleration/deceleration suspend
signal
Brake answer back input
Power failure synchronized signal No function assigned
My function RUN signal Traverse permission signal
Auto-tuning signal
Speed gain switching
*1: Valid when (Frequency setting mode selection 1) is set at (Up/down frequency).
The frequency setting range is between =
~(Upper limit frequency). The acceleration/deceleration time with
respect to the frequency setting remains
/, unless switching between acceleration and deceleration is
performed.
*2: To switch acceleration/deceleration pattern, V/f pattern, torque limit 1~4, give the following signals to switching functions.
Switching signal 1 Switching signal 2
Acceleration/deceleration, V/f, torque limit 1 OFF OFF
Acceleration/deceleration, V/f, torque limit 2 ON OFF
Acceleration/deceleration, V/f, torque limit 3 OFF ON
Acceleration/deceleration, V/f, torque limit 4 ON ON
*3: If , (F: Forward run command) or , (R: Reverse run command) is assigned at the same time, this function
has a priority.
*4: After the motor slows down and comes to a full stop at a pre-excitation command, the motor is set free momentarily to
bring it into a pre-excitation state. This function should not be used when
is set to or . Or the inverter
might malfunction.