



















E6581528
F-30
6
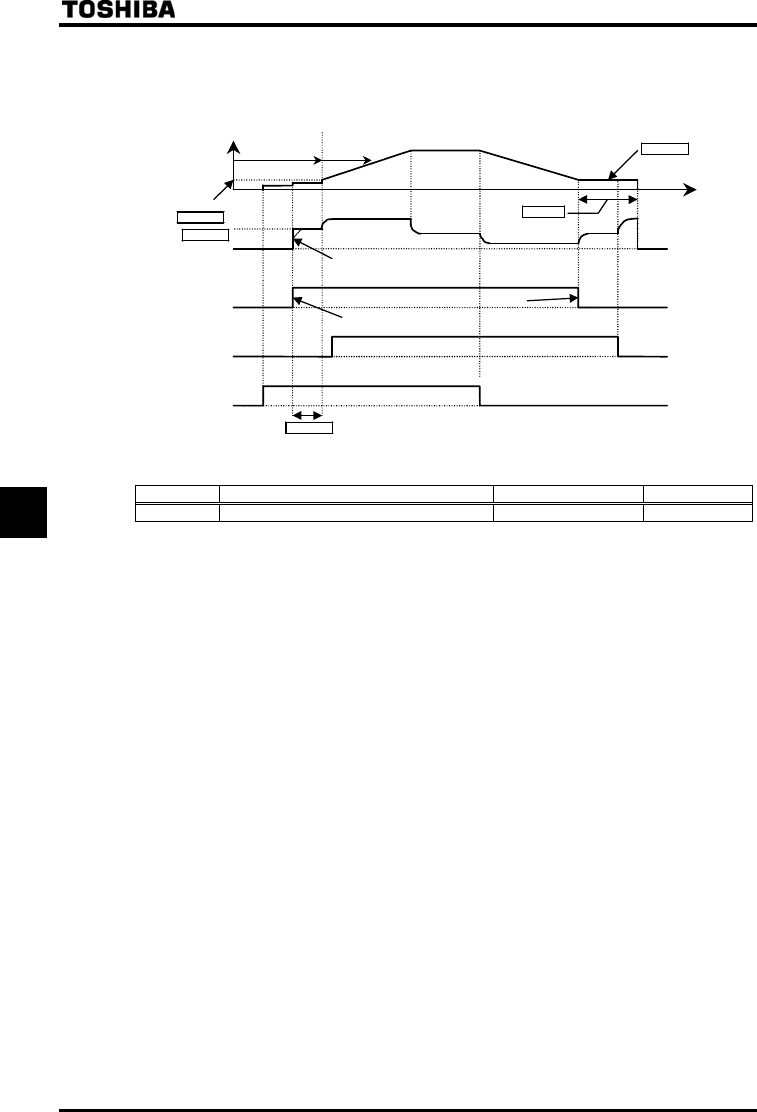
Stopping procedure
At the stop command, the operation frequency is decreased to the creep frequency set with parameter and
the creep frequency is maintained for the creep time set with . While the creep frequency is maintained, the
brake release signal is put out through the braking signal output terminal to apply the brake.
Output frequency
[Hz]
Torque
Braking signal
RUN command
Time [s]
Torque control Speed control
Braking request
Brake release request
Issue of torque command
Creepinjg frequency
Starting frequency
Braking operation
Ex.) When using the OUT1 terminal as the brake signal output terminal
Title Function Adjustment range
Example of setting
Output terminal function selection 1 (OUT1) ~
Learning function
Using this function, rough settings can be made automatically and also parameters , and
can be set automatically.
After the learning function is set, will be set automatically to and to . If necessary, fine
adjust the parameter setting manually.
[Learning operation]
Set parameter to and enter an operation command to start learning. (The frequency and “” are
displayed alternately.)
Parameter (torque) is set, the brake release timing is calculated, and parameter (release time) is
set based on the calculation result. is set automatically according to the motor constant calculated. At the
stop of operation, (creep time) are set.
Note1: Learning should be performed under light-load conditions.
Note2: For the braking functions, the pre-excitation time is automatically determined by the inverter from
motor-related constants.
Depending on the motor used, the preliminary excitation time may be prolonged.
Note3: When using braking functions, set parameter (automatic torque boost) to (voltage vector control +
auto-tuning 1) or set motor-related parameters to .
Note 4: If a counterweight is provided, a learning error may occur. If so, make an adjustment manually.
Note 5: Brake learning (=) should be carried out for normal rotation if is set to (forward
winding), or for reverse rotation if is set to (reverse winding).