



















E6581528
F-8
6
6.3.3 Using the servo lock function
: Input terminal function selection 4 (RES)
: Starting frequency setting
[Parameter setting]
Title Function Adjustment range Example of setting
Input terminal function selection 4 (RES) ~
Starting frequency setting ~ Hz
Note 1: This function is enabled only when parameter is set to (PG feedback vector control).
Note 2: To activate servo lock, parameter (starting frequency setting) needs to be set to [Hz].
Note 3: These parameters are not intended for position control, and if a load larger than the holding power of the
motor is applied, the motor rotates. Keep this in mind.
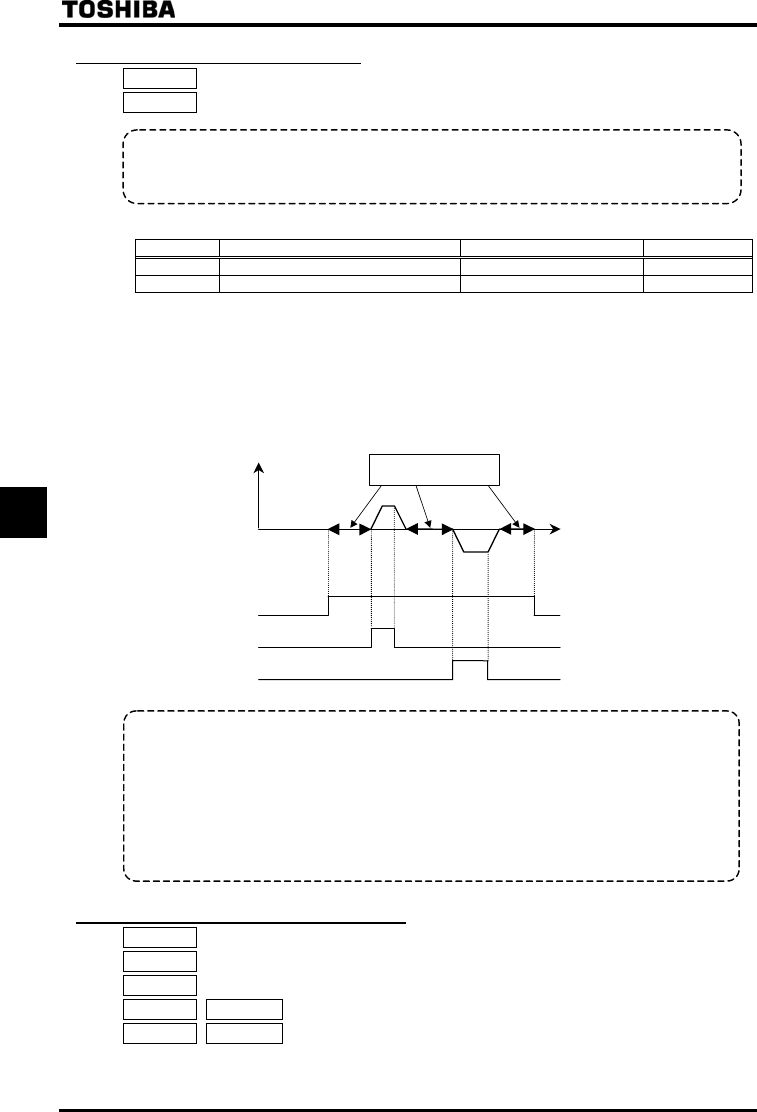
If parameter (for selecting a function for the RES terminal) is set to , a servo lock signal is added to the
RES signal. In that case, turning on the signal to the RES terminal activates the servo lock function. Note that even
when the servo lock function is activated, or the operations can be performed normally by inputting an F or R signal.
Output frequency [Hz]
Servo lock signal
+RES signal
F signal
0Time [s]
Coasting
R signal
Servo lock status
Even if the motor is started with servo lock activated, a starting torque of 150% or more can be produced.
In such a case, however, the thermal protection level is lowered just as is the case with low-speed operation.
Therefore, the following parameters
• (Thermal protection characteristic selection)
• (Motor electronic-thermal protection level 1), , ,
• (OL reduction starting frequency)
• (Motor 150%-overload time limit)
need to be adjusted according to the motor.
6.3.4 Modifying output terminal functions
: Output terminal function selection 1 (OUT1)
: Output terminal function selection 2 (OUT2)
: Output terminal function selection 3 (FL)
~ : Output terminal function selection 4~9
~ : Output terminal function selection 10, 11
⇒ For details, refer to Section 7.2.2.
• Function
As with the operation of a server motor, these parameters allow you to operate the motor at 0Hz by simply
issuing an operation signal. These parameters are used to hold the motor at a standstill.