





E6581528
11
K-12
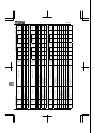
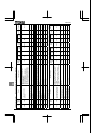
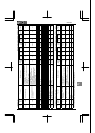
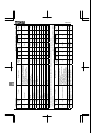
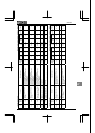
[12] Tripless intensification setup [2/2] Sensorless vector/vector with sensor (●:Effective, -:Ineffective)
Default setting
Vector control
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
=
500V
-50Hz
=
575V
-60Hz
=
690V
-50Hz
Write
during
running
Speed
control
Torque
control
V/f
Constant
Reference
0304 Dynamic braking selection
0:Disabled
1:Enabled (braking resistance overload detect)
2:Enabled (braking resistance overload not
detect)
1/1 0 0 0 Disabled ●/● ●/● ● 5. 19
0305 Overvoltage limit operation
0:Enabled
1:Disabled
2:Enabled (quick deceleration)
3:Enabled (dynamic quick deceleration)
1/1 2 2 2 Disabled ●/● ●/● ● 6. 14. 2
0307
Base frequency voltage
selection
(correction of supply voltage)
0:Without voltage compensation (limitless
output voltage)
1:With voltage compensation (limitless output
voltage)
2:Without voltage compensation (limited output
voltage)
3:With voltage compensation (limited output
voltage)
1/1 0 0 0 Disabled
Parameter is
changeable, but fixed
to "with voltage
compensation"
internally.
When
is set
to 0 or 1, fixed at 1
internally.
When
is set
to 2 or 3, fixed at 3
internally
● 6. 14. 3
0308 Dynamic braking resistance 0.5~1000Ω 0.1/0.1 *1 *1 *1 Disabled ●/● ●/● ● 5. 19
0309
Allowable continuous braking
resistance
0.01~600.0kW 0.01/0.01 *1 *1 *1 Disabled ●/● ●/● ● 5. 19
0310
Non-stop control
time/deceleration time during
power failure
0.1~320.0 sec. 0.1/0.1 2.0 2.0 2.0
Enabled *3/
Disabled
●/● -/- ● 5. 18. 2
0311
Reverse-run prohibition
selection
0:Permit all, 1:Prohibit reverse run
2:Prohibit forward run
1/1 0 0 0 Disabled ●/● ●/● ● 6. 14. 4
0312 Random mode 0:Disabled, 1:Enabled 1/1 0 0 0 Disabled ●/● ●/● ● 5. 17
0316
Carrier frequency control
mode selection
0:Not decrease carrier frequency automatically
1:Decrease carrier frequency automatically
2:Not decrease carrier frequency automatically,
500/575/690V class supported
3:Decrease carrier frequency automatically,
500/575/690V class supported
4: Not decrease carrier frequency automatically,
with sinusoidal filter
5: Decrease carrier frequency automatically,
with sinusoidal filter
1/1 3 3 3 Disabled ●/● ●/● ● 5. 17
0317
Synchronized deceleration
time (time elapsed between
start of deceleration to stop)
0.1~6000 sec. 0.1/0.1 *2 2.0 2.0 2.0 Enabled ●/● -/- ● 5. 18. 2
0318
Synchronized acceleration
time (time elapsed between
start of acceleration to
achievement of specified
speed)
0.1~6000 sec. 0.1/0.1 *2 2.0 2.0 2.0 Enabled ●/● -/- ● 5. 18. 2
0319
Regenerative over-excitation
upper limit
100~160% 1/1 140 140 140 Disabled ●/● ●/● ● 6. 14. 2
This parameter moves to a fundamental parameter. *1: Default values vary depending on the capacity. ⇒ See the table of K-46.
*2: Changing the parameter enables to set to 0.01 sec. (adjustment range: 0.01~600.0 sec.).
*3: Although the setting can be written into memory if is set to (power ride-through control), it cannot be written if is set to (deceleration stop during a power failure).