



















141 www.national.com
CP3BT26
The critical path derives from receiving a remote frame,
which triggers the transmission of one or more data frames.
There are a minimum of four bit times in-between two con-
secutive frames. These bit times start at the validation point
of received frame (reception of 6th EOF bit) and end at the
earliest possible transmission start of the next frame, which
is after the third intermission bit at 100% burst bus load.
These four bit times have to be set in perspective with the
timing requirements of the CAN module.
The minimum duration of the four CAN bit times is deter-
mined by the following Bit Time Logic settings:
PSC = PSCmin = 2
TSEG1 = TSEG1min = 2
TSEG2 = TSEG2min = 1
Bit time = Sync + Time Segment 1 + Time Segment 2
= (1 + 2 + 1) tq = 4 tq
= (4 tq × PSC) clock cycles
= (4 tq × 2) clock cycles = 8 clock cycles
For these minimum BTL settings, four CAN bit times take 32
clock cycles.
The following is an example that assumes typical case:
Minimum BTL settings
Reception and copy of a remote frame
Update of one buffer from TX_RTR
Schedule of one buffer from transmit
As outlined in Table 65, the copy process, update, and
scheduling the next transmission gives a total of 17 + 3 + 2
= 22 clock cycles. Therefore under these conditions there is
no timing restriction.
The following example assumes the worst case:
Minimum BTL settings
Reception and copy of a remote frame
Update of the 14 remaining buffers from TX_RTR
Schedule of one buffer for transmit
All these actions in total require 17 + (14 × 3) + 2 = 61 clock
cycles to be executed by the CAN module. This leads to the
limitation of the Bit Time Logic of 61 / 4 = 15.25 clock cycles
per CAN bit as a minimum, resulting in the minimum clock
frequencies listed below. (The frequency depends on the
desired baud rate and assumes the worst case scenario
can occur in the application.)
Table 66 gives examples for the minimum clock frequency in
order to ensure proper functionality at various CAN bus
speeds.
19.11.4 Bit Time Logic Calculation Examples
The calculation of the CAN bus clocks using CKI = 16 MHz
is shown in the following examples. The desired baud rate
for both examples is 1 Mbit/s.
Example 1
PSC = PSC[5:0] + 2 = 0 + 2 = 2
TSEG1 = TSEG1[3:0] + 1 = 3 + 1 = 4
TSEG2 = TSEG2[2:0] + 1 = 2 + 1 = 3
SJW = TSEG2 = 3
Sample point positioned at 62.5% of bit time
Bit time = 125 ns × (1 + 4 + 3 ± 3) = (1 ± 0.375) µs
Bus Clock = 16 MHz / (2 × (1 + 4 + 3)) = 1 Mbit/s (nomi-
nal)
Example 2
PSC = PSC[5:0] + 1 = 2 + 2 = 4
TSEG1 = TSEG1[3:0] + 1 = 1 + 1 = 2
TSEG2 = TSEG2[2:0] + 1 = 0 + 1 = 1
SJW = TSEG2 = 1
Sample point positioned at 75% of bit time
Bit time = 250 ns × (1 + 2 + 1 ± 1) = (1 ± 0.25) µs
Bus Clock = 16 MHz / (2 × (1 + 4 + 3)) = 1Mbit/s (nominal)
19.11.5 Acceptance Filter Considerations
The CAN module provides two acceptance filter masks
GMSK and BMSK, as described in “Acceptance Filtering”
on page 119, “Global Mask Register (GMSKB/GMSKX)” on
page 136, and “Basic Mask Register (BMSKB/BMSKX)” on
page 137. These masks allow filtering of up to 32 bits of the
message object, which includes the standard identifier, the
extended identifier, and the frame control bits RTR, SRR,
and IDE.
19.11.6 Remote Frames
Remote frames can be automatically processed by the CAN
module. However, to fully enable this feature, the RTR/
XRTR bits (for both standard and extended frames) within
the BMSK and/or GMSK register need to be set to “don’t
care”. This is because a remote frame with the RTR bit set
should trigger the transmission of a data frame with the RTR
bit clear and therefore the ID bits of the received message
need to pass through the acceptance filter. The same ap-
plies to transmitting remote frames and switching to receive
the corresponding data frames.
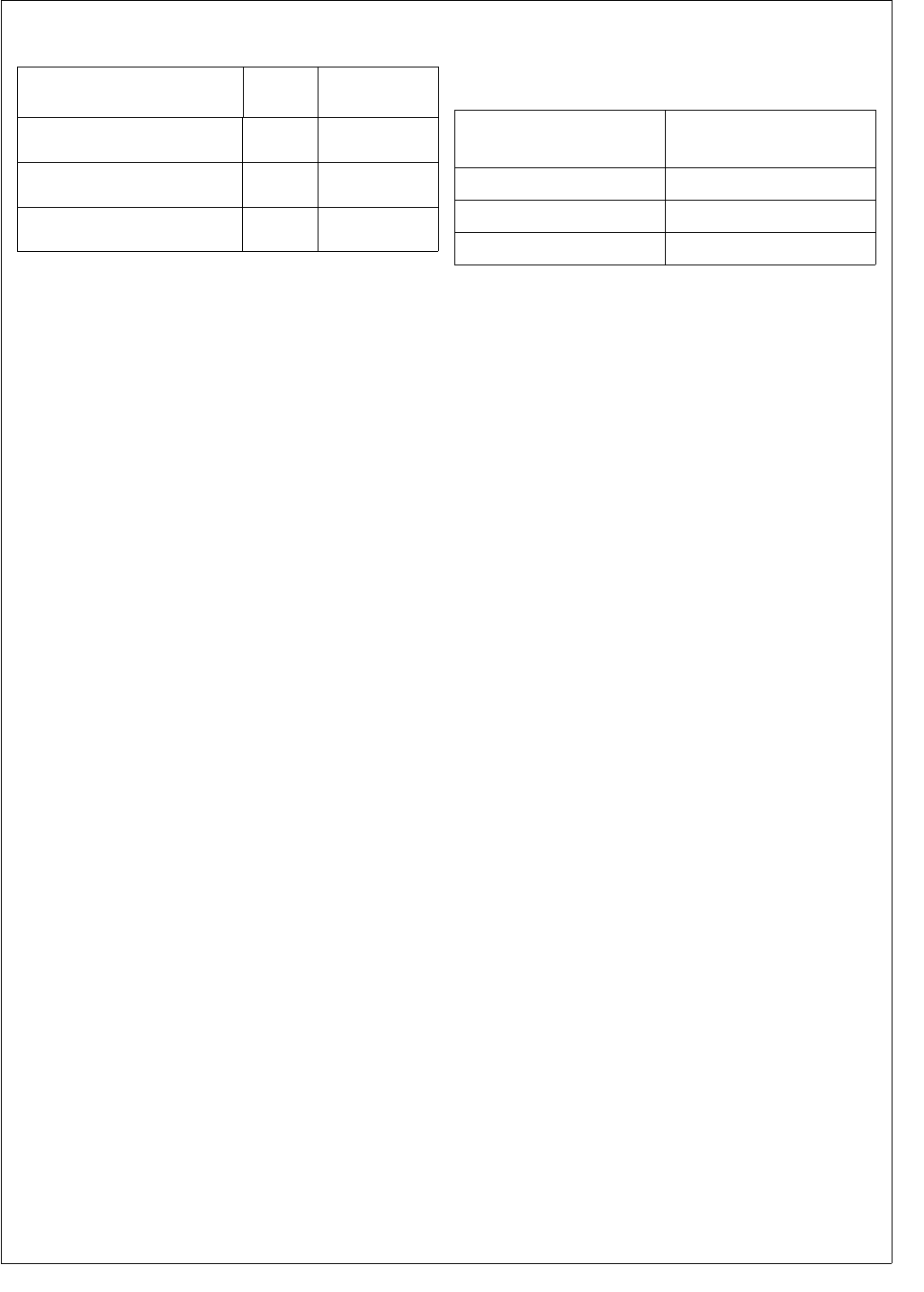
Table 65 CAN Module Internal Timing
Task
Cycle
Count
Occurrence/
Frame
Copy hidden buffer to receive
message buffer
17 0–1
Update status from TX_RTR
to TX_ONCE_RTR
30–15
Schedule a message for
transmission
2 0–1
Table 66 Minimum Clock Frequency Requirements
Baud Rate
Minimum Clock
Frequency
1 Mbit/sec 15.25 MHz
500 kbit/sec 7.625 MHz
250 kbit/sec 3.81 MHz