



















Appendix A: Functions and Instructions 505
8992APPA.DOC TI-89 / TI-92 Plus: Appendix A (US English) Susan Gullord Revised: 02/23/01 1:48 PM Printed: 02/23/01 2:21 PM Page 505 of 132
If all of the equations are polynomials and if
you do NOT specify any initial guesses,
solve()
uses the lexical Gröbner/Buchberger
elimination method to attempt to determine
all real solutions.
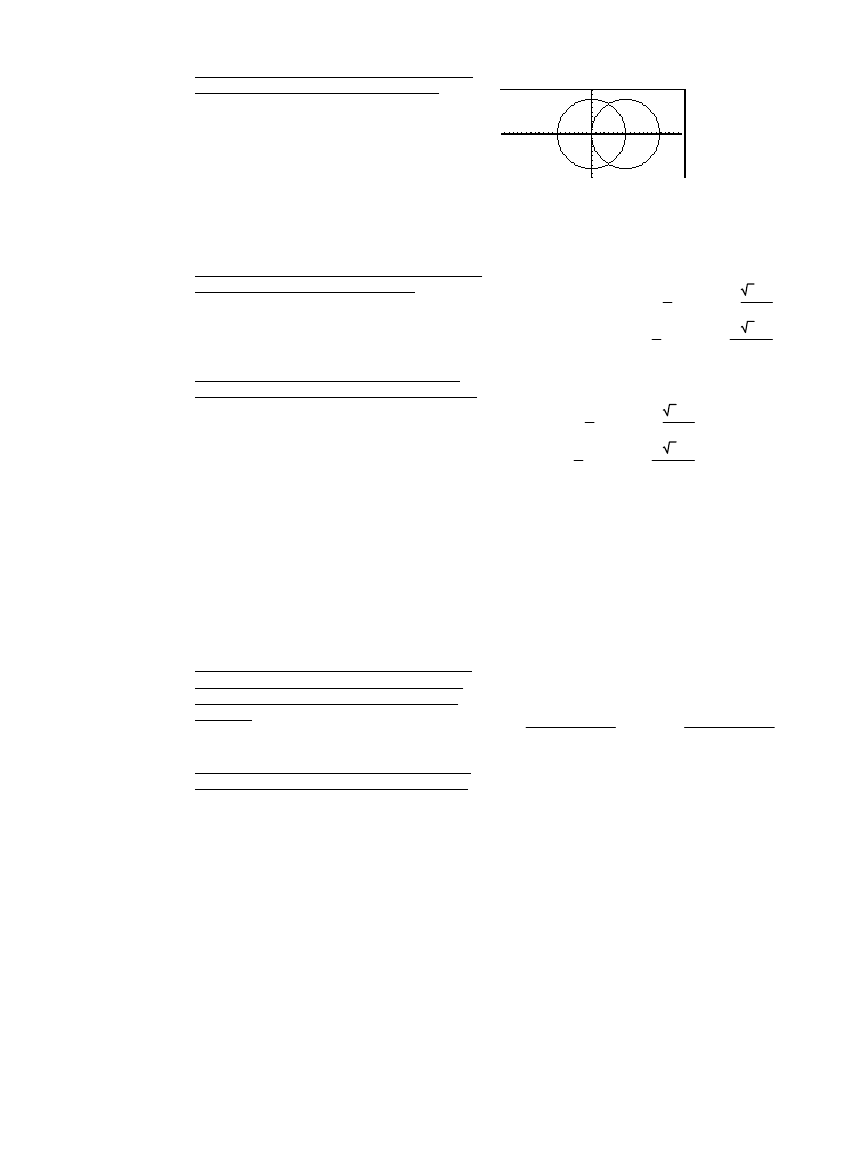
For example, suppose you have a circle of
radius r at the origin and another circle of
radius r centered where the first circle
crosses the positive x-axis. Use
solve()
to find
the intersections.
As illustrated by r in the example to the right,
simultaneous
polynomial
equations can have
extra variables that have no values, but
represent given numeric values that could be
substituted later.
solve(x^2+y^2=r^2 and
(
x
ì
r
)
^2+y^2=r^2,
{
x,y
})
¸
x=
r
2
and y=
3
ø
r
2
or x=
r
2
and y=
ë
3
ø
r
2
You can also (or instead) include solution
variables that do not appear in the equations.
For example, you can include z as a solution
variable to extend the previous example to
two parallel intersecting cylinders of radius r.
The cylinder solutions illustrate how families
of solutions might contain arbitrary constants
of the form @
k
, where
k
is an integer suffix
from 1 through 255. The suffix resets to 1
when you use
ClrHome
or
ƒ
8:Clear Home
.
For polynomial systems, computation time or
memory exhaustion may depend strongly on
the order in which you list solution variables.
If your initial choice exhausts memory or
your patience, try rearranging the variables in
the equations and/or
varOrGuess
list.
solve(x^2+y^2=r^2 and
(
x
ì
r
)
^2+y^2=r^2,
{
x,y,z
})
¸
x=
r
2
and y=
3
ø
r
2
and z=@1
or x=
r
2
and y=
ë
3
ø
r
2
and z=@1
If you do not include any guesses and if any
equation is non-polynomial in any variable
but all equations are linear in the solution
variables,
solve()
uses Gaussian elimination
to attempt to determine all real solutions.
solve(x+
e
^(z)
ù
y=1 and
x
ì
y=sin
(
z
)
,
{
x,y
})
¸
x=
e
z
ø
sin(z)+1
e
z
+1
and y=
ë
(sin(z)
ì
1
e
z
+1
If a system is neither polynomial in all of its
variables nor linear in its solution variables,
solve()
determines at most one solution using
an approximate iterative method. To do so,
the number of solution variables must equal
the number of equations, and all other
variables in the equations must simplify to
numbers.
solve(
e
^(z)
ù
y=1 and
ë
y=sin
(
z
)
,
{
y,z
})
¸
y=.04
1
… an
d
z=3.
1
83…