



















105
[Connection and Setup of Position Control Mode]
Connection and Setup of
Position Control Mode
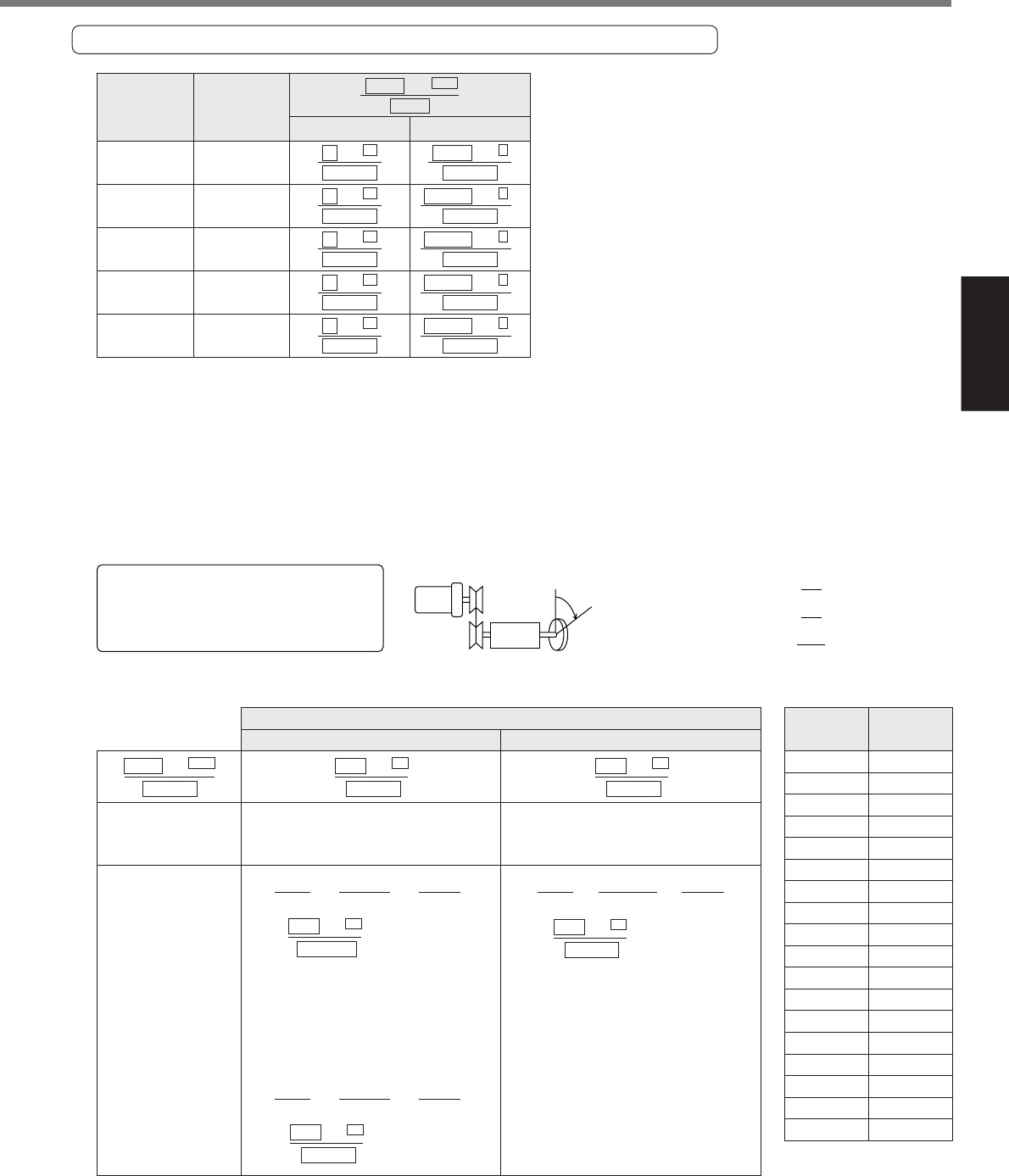
Setup of Motor Rotational Speed and Input Pulse Frequency
Input pulse
frequency
(pps)
2M
500K
250K
100K
500K
Motor
rotational
speed (r/min)
3000
3000
3000
3000
1500
17-bit 2500P/r
17-bit 2500P/r
Encoder
2
n
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
2
10
2
11
2
12
2
13
2
14
2
15
2
16
2
17
Decimal
figures
1
2
4
8
16
32
64
128
256
512
1024
2048
4096
8192
16384
32768
65536
131072
Command pulse
How to determine
parameter
18
365
x
=
x
360
°
60
°
2
13
1 x 2
17
18
365
x
=
x
360
°
60
°
10000
10000
18
365
x
=
x
360
°
60
°
2
6
1 x 2
10
Pr4B
Pr48 x 2
Pr4A
10000
2500
0
x 2
10000
1x 2
10000
10000
0
x 2
5000
10000
0
x 2
2000
10000
0
x 2
10000
50000
0
x 2
e.g.) When you want to rotate the motor by 60
°
with the load of total reduction ratio of 18/365.
*Refer to P.306 "Division Ratio for Parameters" of Supplement.
To rotate the output shaft by 60
°
,
enter the command of 8192 (2
13
)
pulses from the host controller.
To rotate the output shaft by 60
°
,
enter the command of 10000
pulses from the host controller.
60°
<Note>
Defaults of Pr48 and Pr49 are both 0, and encoder resolution is automatically set up as numerators.Defaults
of Pr48 and Pr49 are both 0, and encoder resolution is automatically set up as numerators.
<Remarks>
• Max. input pulse frequency varies depending on input terminals.
• You can set up any values to numerator and denominator, however, setup of an extreme division ratio
or multiplication ratio may result in dangerous action. Recommended ratio is 1/50-20.
Relation between the
motor rotational speed
and input pulse counts
Pulley ratio :
Gear ratio :
Total reduction ratio :
Gear
18
60
12
73
18
365
15
10000
1x 2
17
5000
1x 2
17
2000
1x 2
17
10000
1x 2
16
Pr4B
Pr48
x 2
Pr4A
6912
365
x 2
10
6912
365
x 2
10
884736
365
x 2
17
108
365
x 2
0
108
365
x 2
0
Hence the obtained numerator
becomes 47841280>2621440 and
denominator exceeds the max
value of 10000, you have to re-
duce to the common denominator
to obtain.