



















220
Parameter Setup
Parameters for Velocity and Torque Control
Parameters for Sequence
5E
5F
0 to 500
<500>
*2
0 to 500
<500>
*2
%
%
1st torque limit
setup
2nd torque limit
setup
You can set up the limit value of the motor output torque (Pr5E : 1st
torque, Pr5F : 2nd torque). For the torque limit selection, refer to Pr03
(Torque limit selection).
<Caution>
You cannot set up a larger value to this parameter than the default setup
value of "Max. output torque setup" of System parameter (which you
cannot change through operation with PANATERM
®
or panel). Default
value varies depending on the combination of the motor and the driver.
For details, refer to P.57, "Setup of Torque Limit " of Preparation.
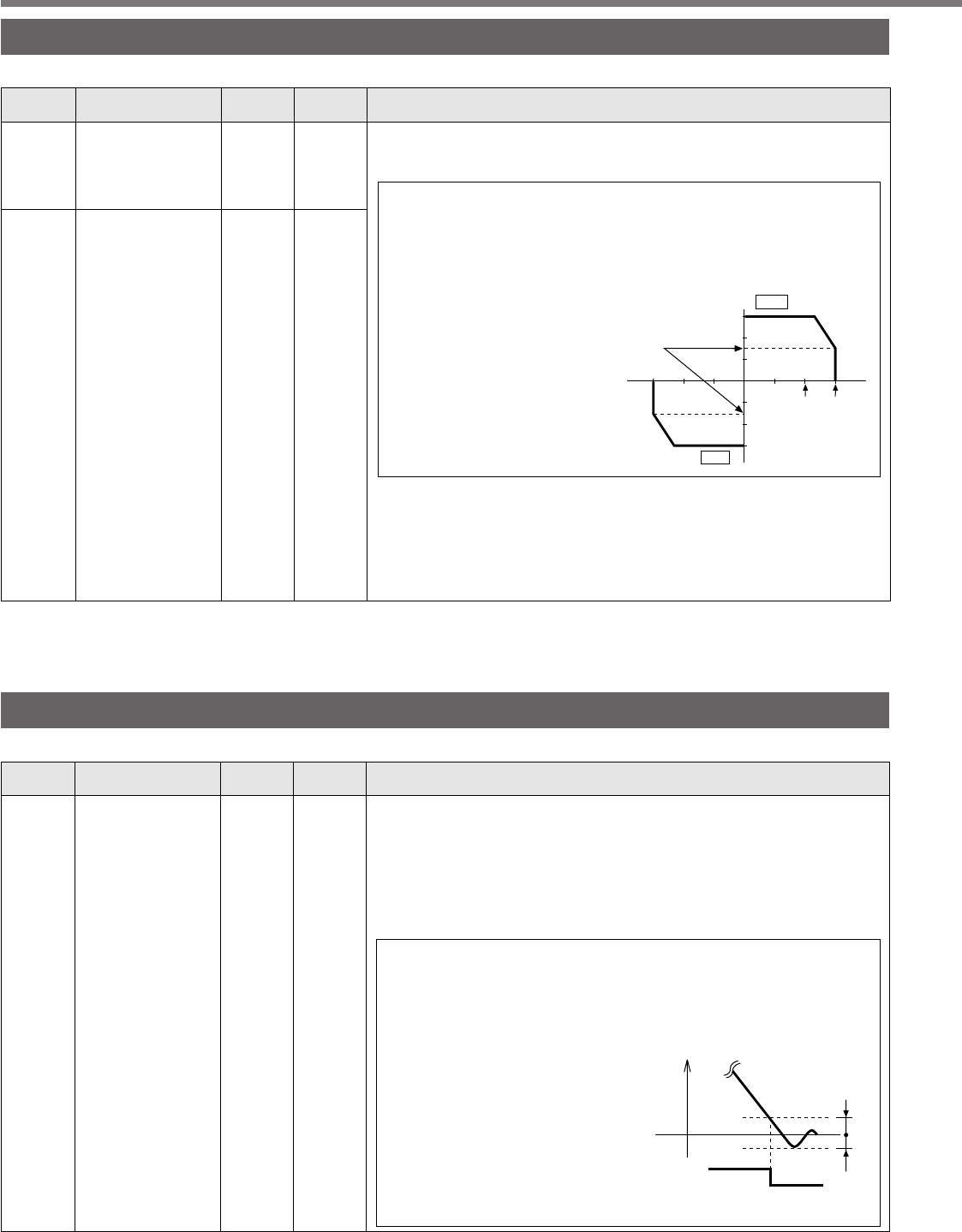
• Setup value is to be given in
% against the rated torque.
• Right fig. shows example of
150% setup with Pr03=1.
• Pr5E limits the max. torque for
both CCW and CW directions.
This torque limit function limits the max. motor torque inside of the
driver with parameter setup.
In normal operation, this driver permits approx. 3 times larger torque
than the rated torque instantaneously. If this 3 times bigger torque
causes any trouble to the load (machine) strength, you can use this
function to limit the max. torque.
speed
200
100
(Rated)
(Rating)
100
200
300
torque [%]
300(Max.)
(Max.)
CW
CCW
when Pr5E=150
Standard default : < >
PrNo.
Setup
range
UnitTitle Function/Content
60 0 to
32767
<131>
PulsePositioning com-
plete(In-position)
range
You can set up the timing to feed out the positioning complete signal
(COIN : CN X5, Pin-39).
The positioning complete signal (COIN) will be fed out when the deviation
counter pulse counts fall within ± (the setup value), after the command
pulse entry is completed.
The setup unit should be the encoder pulse counts at the position control
and the external scale pulse counts at the full-closed control.
• Basic unit of deviation pulse is encoder "resolution", and varies per
the encoder as below.
(1) 17-bit encoder : 2
17
= 131072
(2) 2500P/r encoder : 4 X 2500 = 10000
<Cautions>
1. If you set up too small value
to Pr60, the time until the
COIN signal is fed might
become longer, or cause
chattering at output.
2. The setup of "Positioning
complete range" does not
give any effect to the final
positioning accuracy.
COIN
deviation
pulses
ON
Pr60
Pr60
Standard default : < >
PrNo.
Setup
range
UnitTitle Function/Content
<Note>
• For parameters which default. has a suffix of "*2", value varies depending on the combination of the driver
and the motor.