



















290
Communication
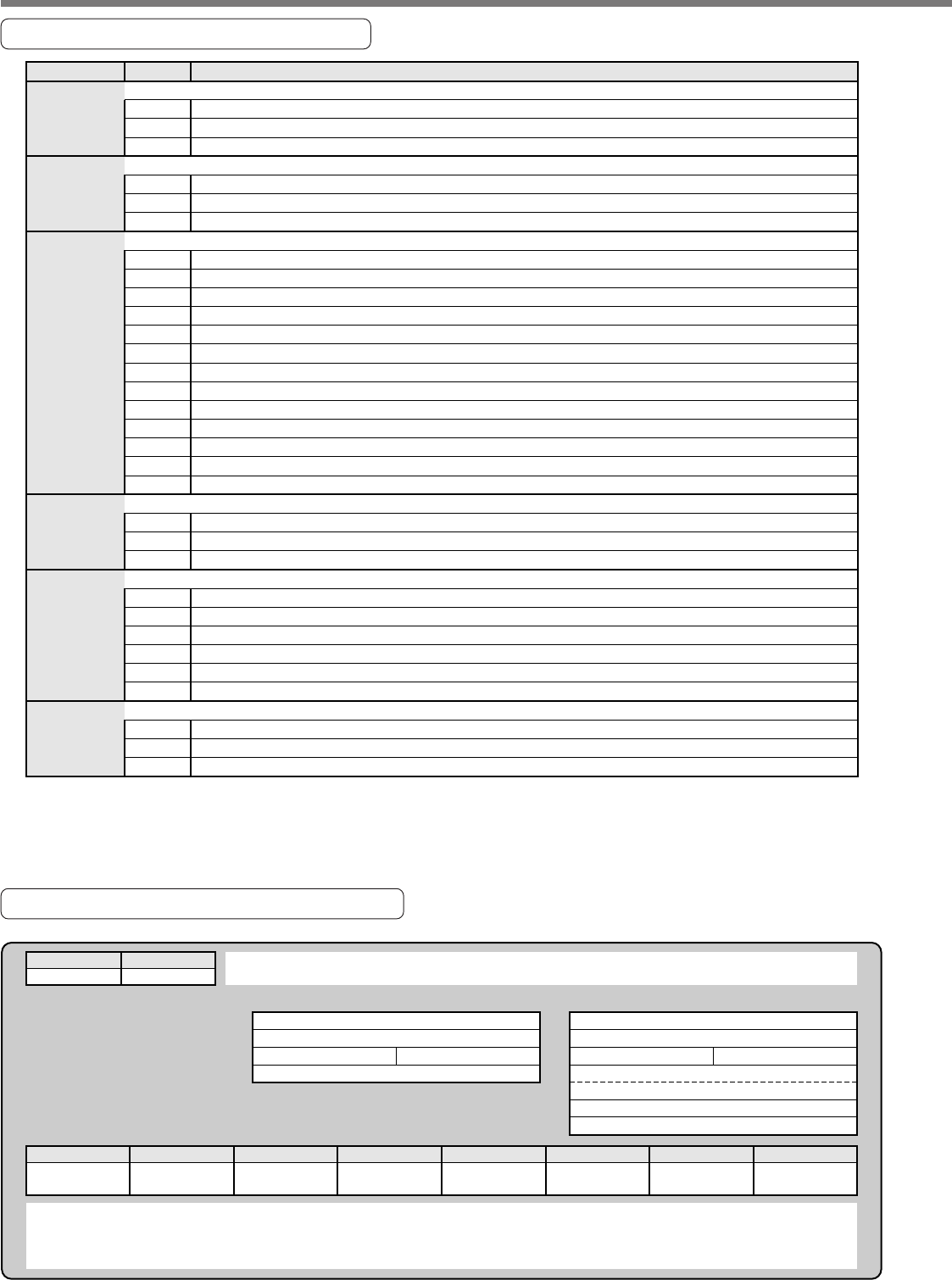
Details of Communication Command
List of Communication Command
• Use the above commands only. If you use other commands, action of the driver cannot be guaranteed.
• When the reception data counts are not correct in the above command, transmission byte1 (Error code
only) will be returned regardless of communication command.
command
0
1
2
8
9
B
mode
1
5
6
1
2
7
0
1
2
4
5
6
7
8
9
A
C
D
E
0
1
4
0
1
2
3
4
B
0
1
2
Content
NOP
Read out of CPU version
Read out of driver model
Read out of motor model
INIT
Setup of RS232 protocol parameter
Setup of RS485 protocol parameter
Capture and release of execution right
POS, STATUS, I/O
Read out of status
Read out of command pulse counter
Read out of feedback pulse counter
Read out of present speed
Read out of present torque output
Read out of present deviation counter
Read out of input signal
Read out of output signal
Read out of present speed, torque and deviation counter
Read out of status, input signal and output signal
Read out of external scale
Read out of absolute encoder
Read out of external scale deviation and sum of pulses
PARAMETER
®
Individual read out of parameter
Individual writing of parameter
Writing of parameter to EEPROM
ALARM
Read out of present alarm data
Individual read out of user alarm history
Batch read out of alarm history
Clear of user alarm history (in EEPROM as well)
Alarm clear
Absolute clear
PARAMETER
®
Individual read out of user parameter
Page read out of user parameter
Page writing of parameter
0Dh
axis
Model of ,motor (upper)
Model of motor (lower)
Error code
checksum
command
0
mode
1
• Read out of CPU Version Information
Reception data
0
axis
checksum
01
Error code
Transmission data
• Version information will be returned in upper data and lower data. (Decimal point will be returned by making the lower
4 bit of the upper dataas 0.)
• Version will be displayed in figures from 0 to 9. (e.g. Version 3.1 will be upper data 30h, lower data 13h.)
bit7
0 : Normal
1 : Error
65
Command error
4
RS485 error
3210
3
axis
Version (upper)
Version (lower)
Error code
checksum
01