



















219
[Connection and Setup of Full-closed Control]
Full-Closed
Control Mode
4D
*
0 to 31
<0>
Setup of FIR
smoothing
You can set up the moving average times of the FIR filter covering the command
pulse. (Setup value + 1) become average travel times.
4C 0 to 7
<1>
Setup of primary
delay smoothing
Smoothing filter is the filter for primary delay which is inserted after the electronic
gear.
You can set the time constant of the smoothing filter in 8 steps with Pr4C.
Setup value
0
<1>
7
Time constant
No filter function
Time constant small
Time constant large
Purpose of smoothing filter
• Reduce the step motion of the motor while the command pulse is rough.
• Actual examples which cause rough command pulse are;
(1) when you set up a high multiplier ratio (10 times or more).
(2) when the command pulse frequency is low.
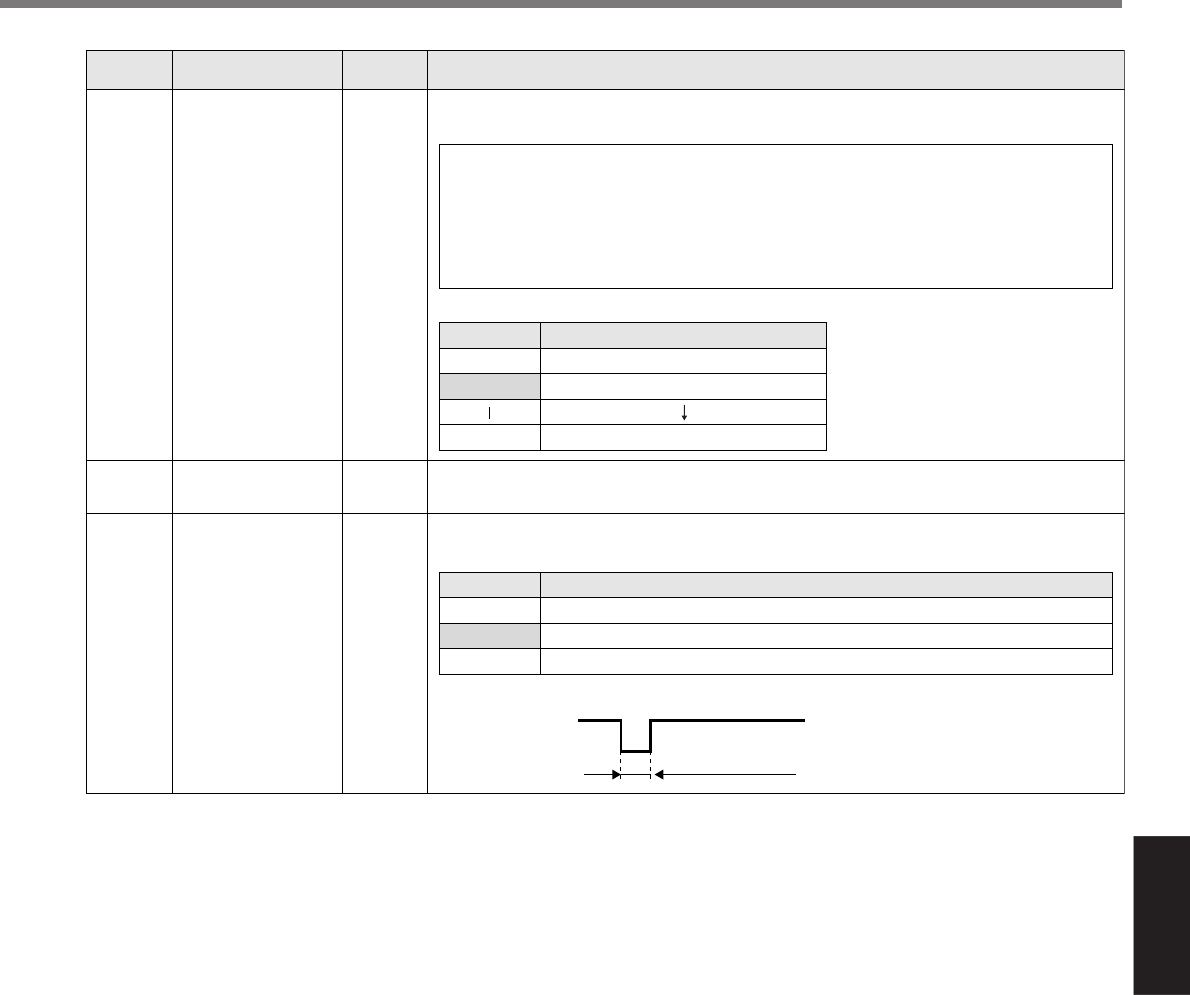
4E 0 to 2
<1>
Counter clear
input mode
You can set up the clearing conditions of the counter clear input signal which clears
the deviation counter.
*1 : Min. time width of CL signal
Setup value
0
<1>
2
Clearing condition
Clears the deviation counter at level (shorting for longer than 100µs)*1
Clears the deviation counter at falling edge (open-shorting for longer than 100µs)*1
Invalid
CL(Pin-30)
100µs or longer
PrNo.
Setup
range
Title Function/Content
Standard default : < >
<Notes>
•For parameters which No. have a suffix of "*", changed contents will be validated when you turn on the
control power.