



















221
[Connection and Setup of Full-closed Control]
Full-Closed
Control Mode
63 0 to 3
<0>
–Setup of
positioning
complete
(In-position)
output
You can set up the action of the positioning complete signal (COIN : Pin-
39 of CN X5) in combination with Pr60 (Positioning complete range).
Setup value
<0>
1
2
3
Action of positioning complete signal
The signal will turn on when the positional deviation is smaller
than Pr60 (Positioning complete range)
The signal will turn on when there is no position command and the
positional deviation is smaller than Pr60 (Positioning complete range).
The signal will turn on when there is no position command, the
zero-speed detection signal is ON and the positional deviation is
smaller than Pr60 (Positioning complete range).
The signal will turn on when there is no position command and the
positional deviation is smaller than Pr60 (Positioning complete range).
Then holds "ON" status until the next position command is entered.
65 0 to 1
<1>
–LV trip selection at
main power OFF
You can select whether or not to activate Err13 (Main power under-
voltage protection) function while the main power shutoff continues for the
setup of Pr6D (Main power-OFF detection time).
<Caution>
This parameter is invalid when Pr6D (Detection time of main power
OFF)=1000. Err13 (Main power under-voltage protection) is triggered
when setup of P66D is long and P-N voltage of the main converter falls
below the specified value before detecting the main power shutoff,
regardless of the Pr65 setup. Refer to P.42, "Timing Chart-At Power-ON"
of Preparation as well.
Setup value
0
<1>
Action of main power low voltage protection
When the main power is shut off during Servo-ON, Err13 will
not be triggered and the driver turns to Servo-OFF. The driver
returns to Servo-ON again after the main power resumption.
When the main power is shut off during Servo-ON, the driver
will trip due to Err13 (Main power low voltage protection).
66
*
0 to 2
<0>
–Sequence at
over-travel inhibit
You can set up the running condition during deceleration or after stalling,
while over-travel inhibit input (CCWL : Connector CN X5, Pin-9 or CWL :
Connector CN X5, Pin-8) is valid
<Caution>
In case of the setup value of 2, torque limit during deceleration will be
limited by the setup value of Pr6E (Torque setup at emergency stop ).
Setup value
<0>
1
2
During deceleration
Dynamic brake
action
Torque command=0
towards inhibited direction
Emergency stop
After stalling
Torque command=0
towards inhibited direction
Torque command=0
towards inhibited direction
Torque command=0
towards inhibited direction
Deviation counter content
Hold
Hold
Clears before/
after deceleration
Standard default : < >
PrNo.
Setup
range
UnitTitle Function/Content
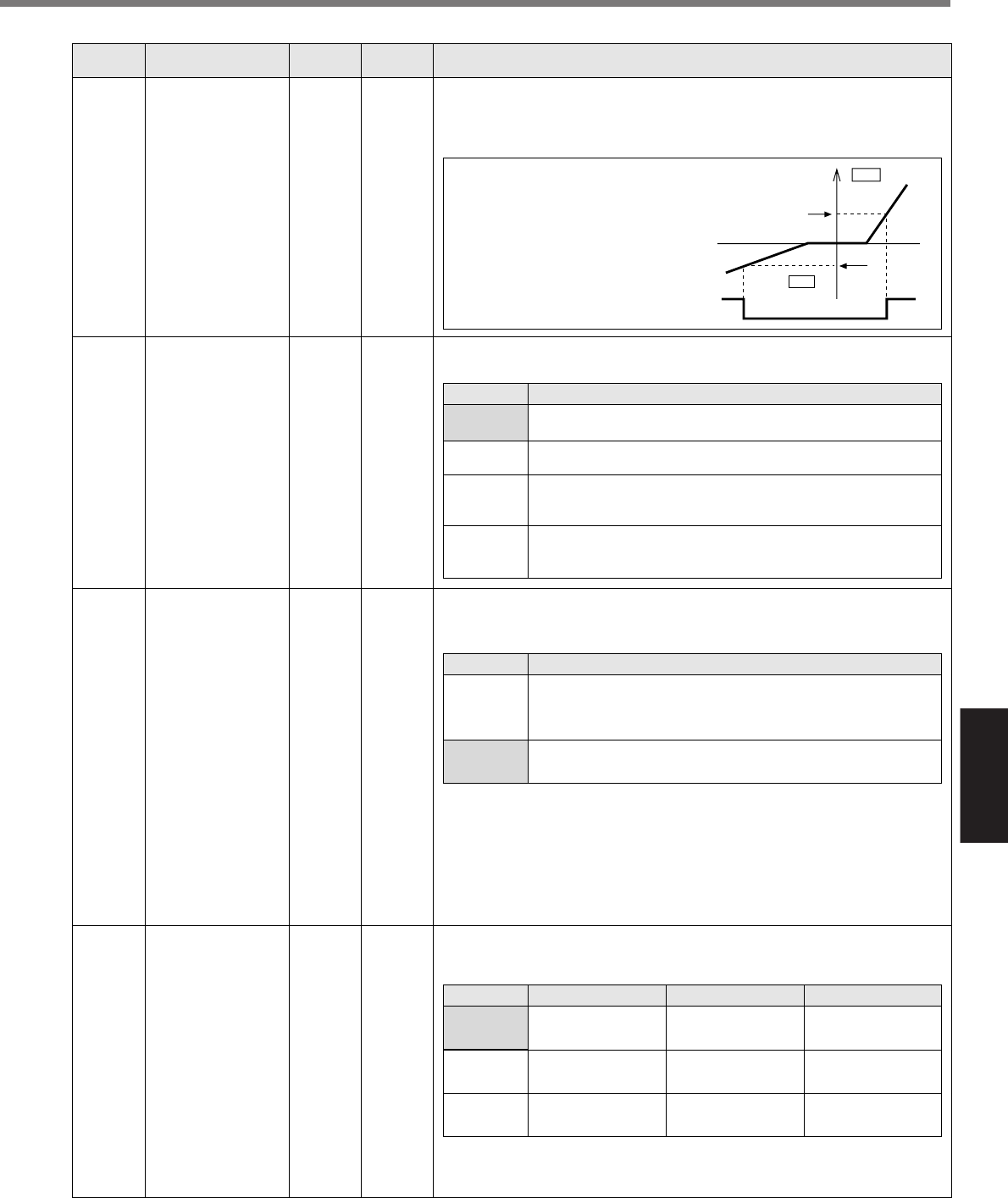
61 10 to
20000
<50>
r/minZero-speed
You can set up the timing to feed out the zero-speed detection output signal
(ZSP : CN X5, Pin-12 or TCL : CN X5, Pin-40) in rotational speed [r/min].
The zero-speed detection signal (ZSP) will be fed out when the motor
speed falls below the setup of this parameter, Pr61.
• The setup of P61 is valid for both
CCW and CW direction regardless
of the motor rotating direction.
• There is hysteresis of 10 [r/min].
speed
CW
ZSP
ON
(Pr61+10)r/min
(Pr61–10)r/min
CCW
<Notes>
•For parameters which No. have a suffix of "*", changed contents will be validated when you turn on the
control power.