



















183
[Connection and Setup of Torque Control Mode]
Connection and Setup of
Torque Control Mode
Parameters for Velocity and Torque Control
5B 0 to 1
<0>
–Selection of
torque command
You can select the input of the torque command and the speed limit.
Pr5B
<0>
1
Torque command
SPR/TRQR/SPL
CCWTL/TRQR
Velocity limit
Pr56
SPR/TRQR/SPL
50
10 to 2000
<500>
(r/min)/VInput gain of
speed command
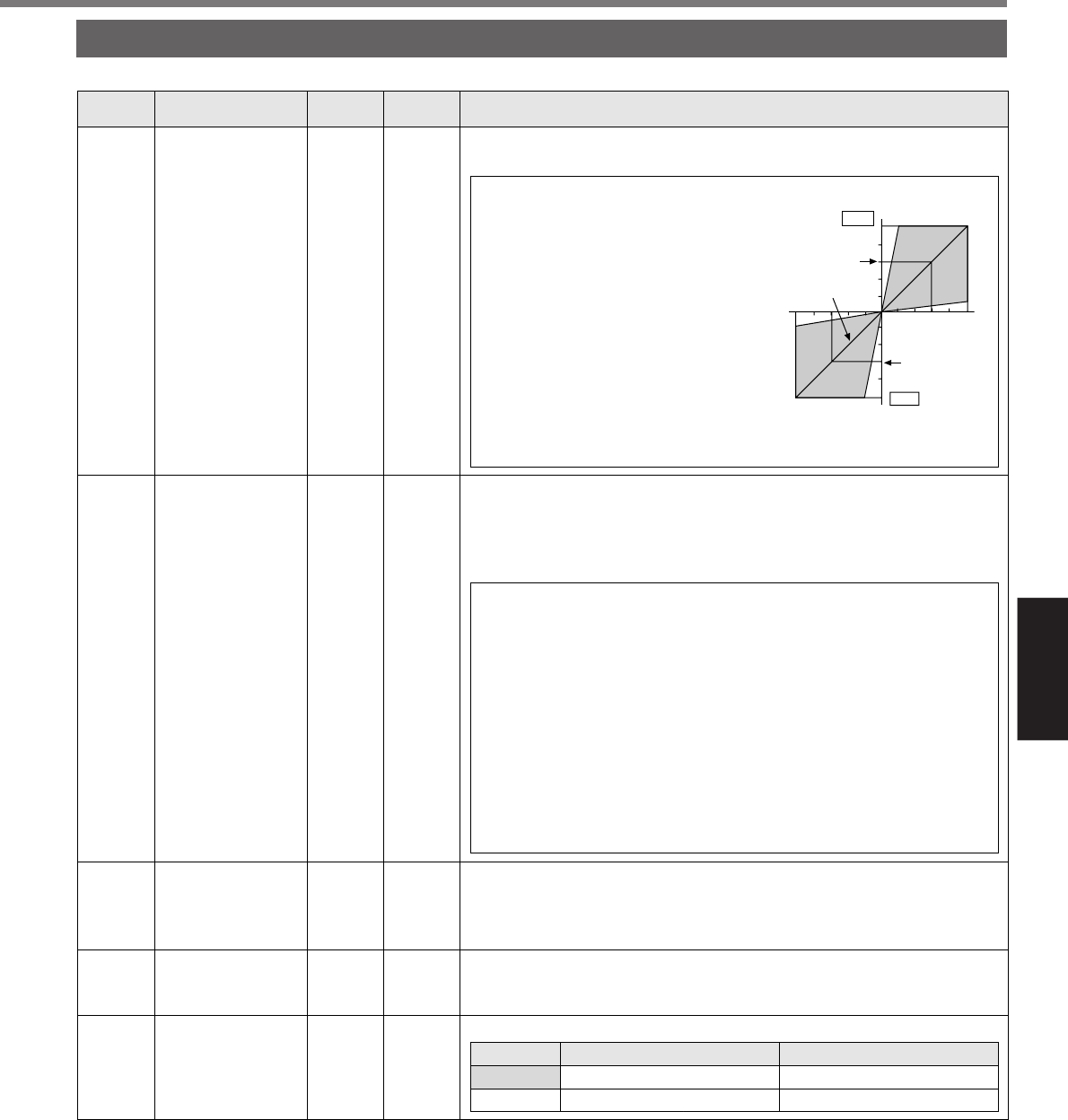
You can set up the relation between the voltage applied to the speed
command input (SPR : CN X5, Pin-14) and the motor speed.
• You can set up a "slope" of the relation
between the command input voltage
and the motor speed, with Pr50.
• Default is set to Pr50=500 [r/min],
hence input of 6V becomes 3000r/min.
<Cautions>
1. Do not apply more than ±10V to the
speed command input (SPR).
2. When you compose a position loop
outside of the driver while you use the
driver in velocity control mode, the
setup of Pr50 gives larger variance to
the overall servo system.
Pay an extra attention to oscillation caused by larger setup of Pr50.
3000
Speed (r/min)
–3000
Slope at
ex-factory
Command input
voltage (V)
–10 –6
CW
246810
CCW
Standard default : < >
PrNo.
Setup
range
UnitTitle Function/Content
52 –2047 to
2047
<0>
0.3mVSpeed command
offset
• You can make an offset adjustment of analog speed command (SPR :
CN X5, Pin-14) with this parameter.
• The offset volume is 0.3mV per setup value of "1".
• There are 2 offset methods, (1) Manual adjustment and (2) Automatic
adjustment.
1) Manual adjustment
• When you make an offset adjustment with the driver alone,
Enter 0 V exactly to the speed command input (SPR/TRQR), (or
connect to the signal ground), then set this parameter up so that
the motor may not turn.
• when you compose a position loop with the host,
• Set this parameter up so that the deviation pulse may be reduced
to 0 at the Servo-Lock status.
2) Automatic adjustment
• For the details of operation method at automatic offset adjustment
mode, refer to P.73, "Auxiliary Function Mode" of Preparation.
• Result after the execution of the automatic offset function will be
reflected in this parameter, Pr52.
57 0 to 6400
<0>
10µsSetup of speed
command filter
You can set up the time constant of the primary delay filter to the analog
speed command/analog torque command/analog velocity control (SPR :
CN X5, Pin-14)
56 –20000 to
20000
<0>
r/min4th speed of
speed setup
You can set up the speed limit value in unit of [r/min].
<Caution>
The absolute value of the parameter setup is limited by Pr73 (Set up of
over-speed level).