



















132
Wiring to the connector, CN X5
Title of signal
Pin No.
Symbol Function
I/F circuit
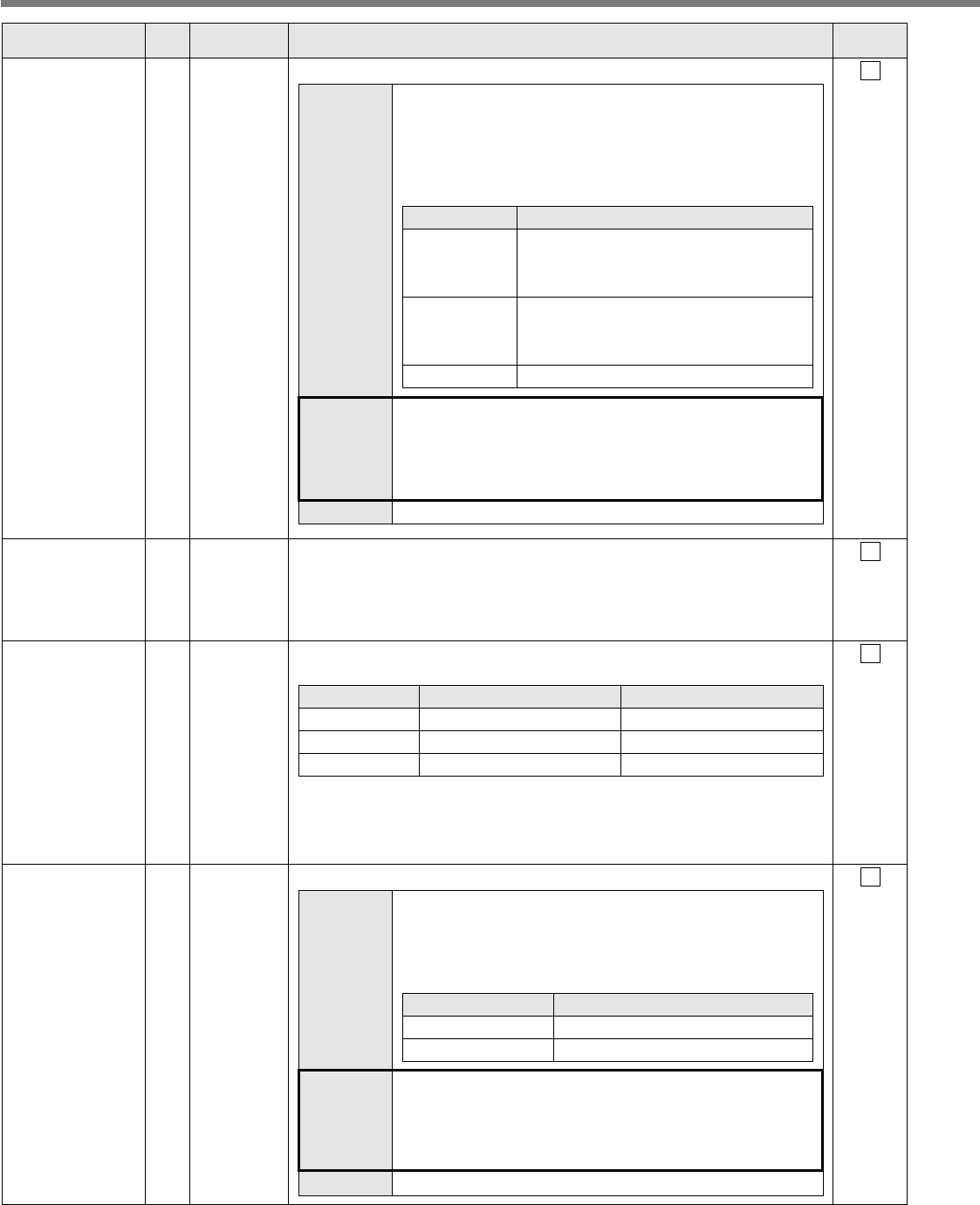
Selection 1 input
of internal
command speed
33
SI
P.128
INTSPD1 • Function varies depending on the control mode.
• Inhibition input of command pulse input (INH)
• Ignores the position command pulse by opening the
connection to COM–
• You can invalidate this input with Pr43 (Invalidation of
command pulse inhibition input)
• Selection 1 input of internal command speed (INTSPD1)
•You can make up to 8-speed setups combining
INH/INTSPD2 and CL/INTSPD3 inputs. For details of the
setup, refer to the table of P.131,
"Selection of Internal Speed" of Velocity Control Mode.
• This input is invalid.
Position/
Full closed
control
Velocity
control
Torque control
Control mode
switching input
32
SI
P.128
C-MODE • You can switch the control mode as below by setting up Pr02 (Control
mode setup) to 3-5.
<Caution>
Depending on how the command is given at each control mode, the action
might change rapidly when switching the control mode with C-MODE. Pay
an extra attention.
Pr02 setup
3
4
5
Open (1st)
Position control
Position control
Velocity control
Connection to COM– (2nd)
Velocity control
Torque control
Torque control
Pr43
0
1(Default)
Content
INH is valid.
INH is valid.
Selection 2 input
of internal
command speed
30
SI
P.128
INTSPD2 • Function varies depending on the control mode.
• Input (CL) which clears the positional deviation counter
and full-closed deviation counter.
• You can clear the counter of positional deviation and
full-closed deviation by connecting this to COM–.
• You can select the clearing mode with Pr4E (Counter clear
input mode).
• Input of selection 2 of internal command speed (INTSPD2)
• You can make up to 8-speed setups combining INH/
INTSPD1 and CL/INTSPD3 inputs. For details of setup,
refer to the table in P.131, "Selection of Internal Speed" of
Velocity Control Mode.
• This input is invalid.
Position/
Full-closed
control
Velocity
control
Torque control
Pr4E
0
1
[Default]
2
Content
Clears the counter of positional devia-
tion and full-closed deviation while CL is
connected to COM–.
Clears the counter of positional deviation
and full-closed deviation only once by
connecting CL to COM– from open status.
CL is invalid
Alarm clear input 31
SI
P.128
A-CLR • You can release the alarm status by connecting this to COM– for more
than 120ms.
• The deviation counter will be cleared at alarm clear.
• There are some alarms which cannot be released with this input.
For details, refer to P.252, "Protective Function " of When in Trouble.