

















360
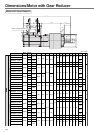
“Hit & Stop” Homing and “Press & Hold” Control
Homing with Hit & Stop
You can set up the homing position with "Hit & Stop" where it is not easy to install a sensor due to environment.
(1) when you make a point where the work (load)
hits as an origin
(2) when you stop the work (load) using Z-phase
after making a hitting point as a starting point,
then make that stopping point as an origin.
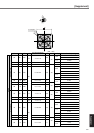
1st
origin
origin
2nd torque limit 2nd torque limit
1st
Pin-40 TLC
(Torque in-limit)
Pin-27
(GAIN/TL-SEL)
Torque
Counter
clear
command
50%
Motor
speed
Pin-40 TLC
(Torque in-limit)
Pin-27
(GAIN/TL-SEL)
Torque
Counter
clear
command
Motor
speed
Z-phase
ON
ON
ON
ON
ON
ON
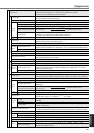
Parameter
No.
5F
70
73
03
09
<Remarks>
Make the Pin-27 H (Off=Open) after the Hit & Stop Homing is completed.
hits
hits
(1) (2)
(1)
(1)
(1)
(2)
(2)
(2)
(3)
(3)
Title
Setup of 2nd torque limit
Excess setup of position deviation
Setup of over-speed level
Selection of torque limit
Selection of alarm output
Setup example
50 (Set up to less than 100%)
25000
0 (6000r/min)
3
0 (Torque in-limit)