



















228
Real-Time Auto-Gain Tuning Mode
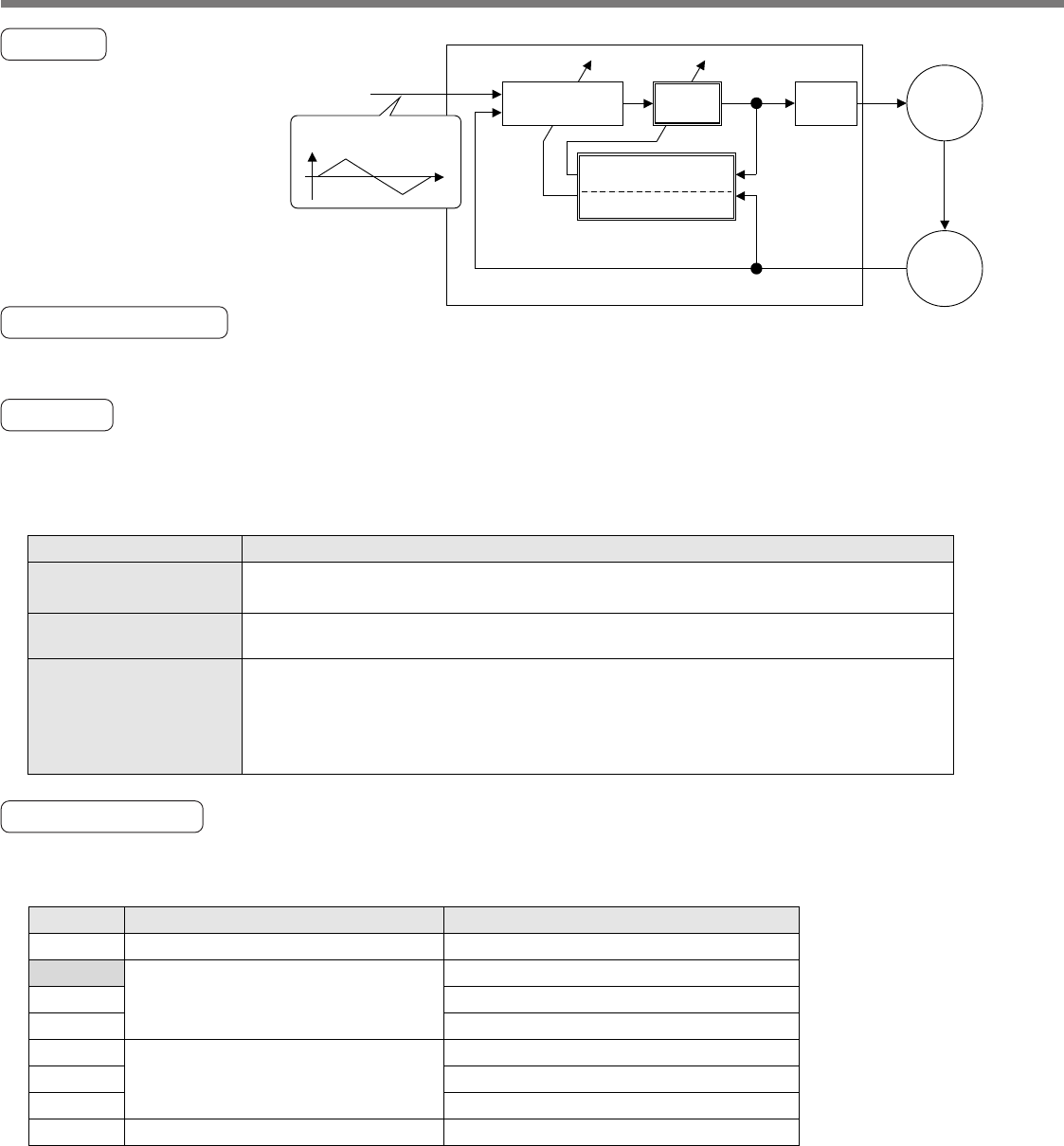
Outline
Estimates the load inertia of the
machine in real time and sets
up the optimum gain automati-
cally responding to the result.
Applicable Range
Real time auto-gain tuning is applicable to all control modes.
Caution
Real-time auto-gain tuning may not be executed properly under the conditions described in the table below.
In these cases, use the normal mode auto-gain tuning (refer to P.236 of Adjustment), or execute the manual
auto-gain tuning (refer to P.240).
Action command under
actual condition
Position/Velocity
command
Position/Velocity
control
Servo driver
Real time
auto-gain tuning
Resonance frequency
estimation
Load inertia estimation
Adaptive
Filter
current
control
Gain
auto-setup
Filter
auto-adjustment
Torque
command
Motor
current
Motor
speed
Motor
Encoder
Conditions which obstruct real-time auto-gain tuning action
•
The load is too small or large compared to the rotor inertia. (less than 3 times or more than 20 times)
• The load inertia changes too quickly (10 [s] or less)
• The machine stiffness is extremely low.
• A chattering such as backlash exists.
• The motor is running continuously at low speed of (100 [r/min] or lower.
• Acceleration/deceleration is slow (2000 [r/min] per 1[s] or low).
•
Acceleration/deceleration torque is smaller than unbalanced weighted/viscous friction torque.
• When the speed condition of 100 [r/min] or more and acceleration/deceleration condition of
2000 [r/min] per 1 [s] are not maintained for 80 [ms].
Load
Load inertia
Action pattern
How to Operate
1) Bring the motor to stall (Servo-OFF).
2) Set up Pr21 (Setup of real-time auto-gain tuning mode) to 1-7.
Setup value
0
[1]
2
3
4
5
6
7
Real time auto-gain tuning
(not in use)
normal mode
vertical axis mode
no gain switching mode
Varying degree of load inertia in motion
–
no change
slow change
rapid change
no change
slow change
rapid change
no change
When the changing degree of load inertia is large, set up 3 or 6.
When the motor is used for vertical axis, set up 4-6.
When vibration occurs during gain switching, set up 7.
3) Set up Pr22 (Machine stiffness at real-time auto-gain tuning) to 0 or smaller value.
4) Turn to Servo-ON to run the machine normally.
5) Gradually increase Pr22 (Machine stiffness at real-time auto-gain tuning, machine) when you want to
obtain a better response. Lower the value (0-3) when you experience abnormal noise or oscillation.
6) Write the result to EEPROM when you want to save it.