



















113
[Connection and Setup of Position Control Mode]
Connection and Setup of
Position Control Mode
<Notes>
• Parameters which default values have a suffix of "*" will be automatically set up during real time auto-gain
tuning. When you change manually, invalidate the real-time auto-gain tuning first then set, referring to
P.239, "Release of Automatic Gain Adjusting Function" of Adjustment.
24 0 to 2
<0>
–Selection of
damping filter
switching
You can select the switching method when you use the damping filter.
0 : No switching (both of 1st and 2nd are valid.)
1 : You can select either 1st or 2nd with damping control switching input
(VS-SEL).
when VS-SEL is opened, 1st damping filter selection (Pr2B, 2C)
when VS-SEL is close, 2nd damping filter selection (Pr2D, 2E)
2 : You can switch with the position command direction.
CCW : 1st damping filter selection (Pr2B, 2C).
CW : 2nd damping filter selection (Pr2D, 2E).
25 0 to 7
<0>
–Setup of an action
at normal mode
auto-gain tuning
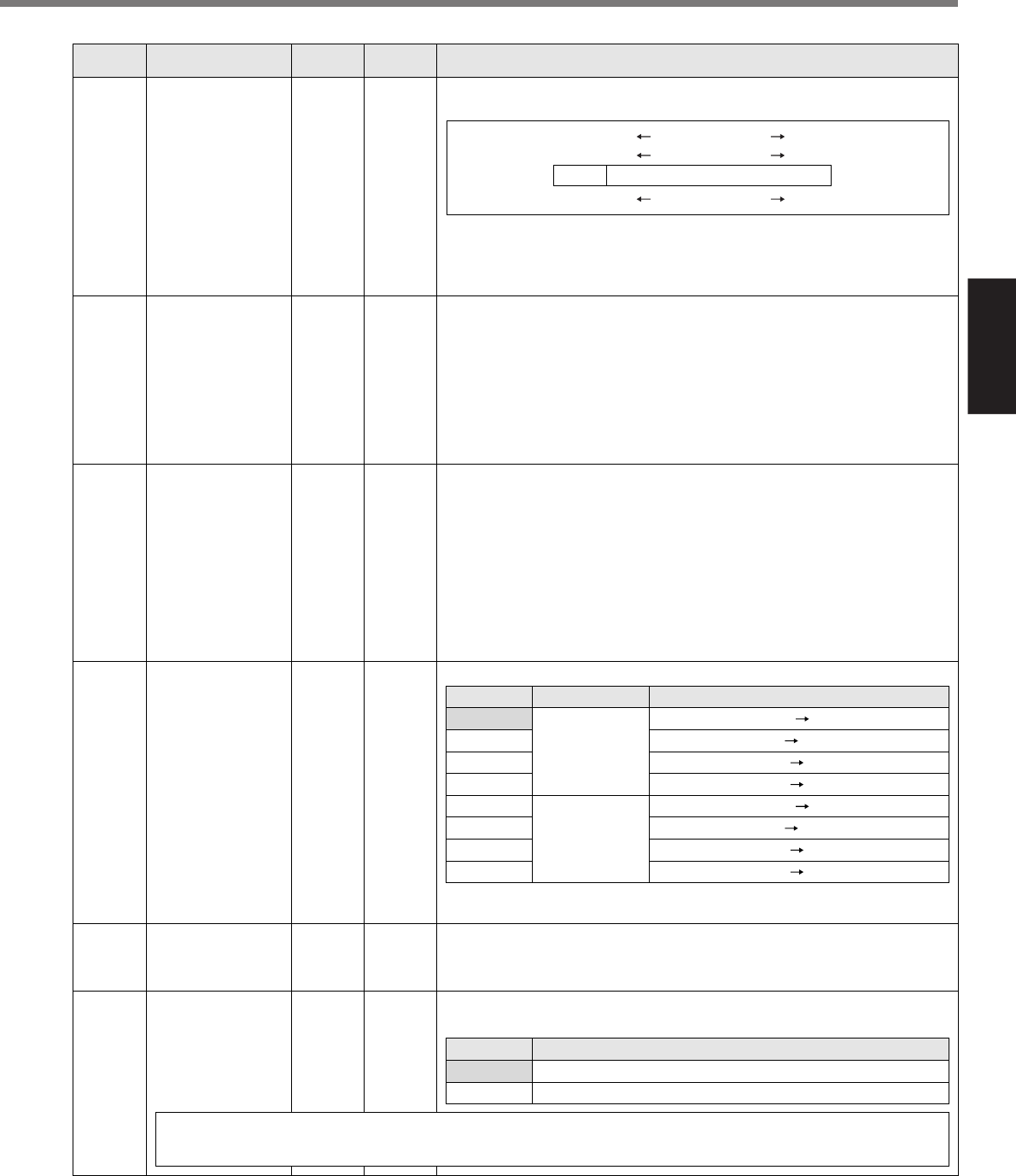
You can set up the action pattern at the normal mode auto-gain tuning.
e.g.) When the setup is 0, the motor turns 2 revolutions to CCW and 2
revolutions to CW.
Setup value
<0>
1
2
3
4
5
6
7
Number of revolution
2 [revolution]
1 [revolution]
Rotational direction
CCW CW
CW CCW
CCW CCW
CW CW
CCW CW
CW CCW
CCW CCW
CW CW
27 0 to 1
<0>*
–Setup of
instantaneous
speed observer
With a high stiffness machine, you can achieve both high response and
reduction of vibration at stall, by using this instantaneous speed observer.
Setup value
<0>*
1
Instantaneous speed observer setup
Invalid
Valid
You need to set up the inertia ratio of Pr20 correctly to use this function.
If you set up Pr21, real-time auto-gain tuning mode setup, to other than 0 (valid), Pr27 becomes 0 (invalid)
23 0 to 2
<1>
–Setup of adaptive
filter mode
You can set up the action of the adaptive filter.
0 : Invalid
1 : Valid
2 : Hold
(holds the adaptive filter frequency when this setup is changed to 2.)
<Caution>
When you set up the adaptive filter to invalid, the adaptive filter frequency
of Pr2F will be reset to 0. The adaptive filter is always invalid at the
torque control mode.
22 0 to 15
A to C-frame:
<4>
D to F-frame:
<1>
–Selection of
machine stiffness
at real-time
auto-gain tuning
You can set up the machine stiffness in 16 steps while the real-time auto-
gain tuning is valid.
<Caution>
When you change the setup value rapidly, the gain changes rapidly as
well, and this may give impact to the machine. Increase the setup
gradually watching the movement of the machine.
low machine stiffness high
low servo gain high
low response high
Pr22 0, 1- - - - - - - - - - - - 14, 15
26 0 to 1000
<10>
0.1
revolution
Setup of software
limit
You can set up the movable range of the motor against the position
command input range. When the motor movement exceeds the setup
value, software limit protection of Pr34 will be triggered. This parameter is
invalid with setup value of 0.
Standard default : < >
PrNo.
Setup
range
UnitTitle Function/Content