




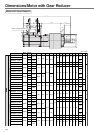












358
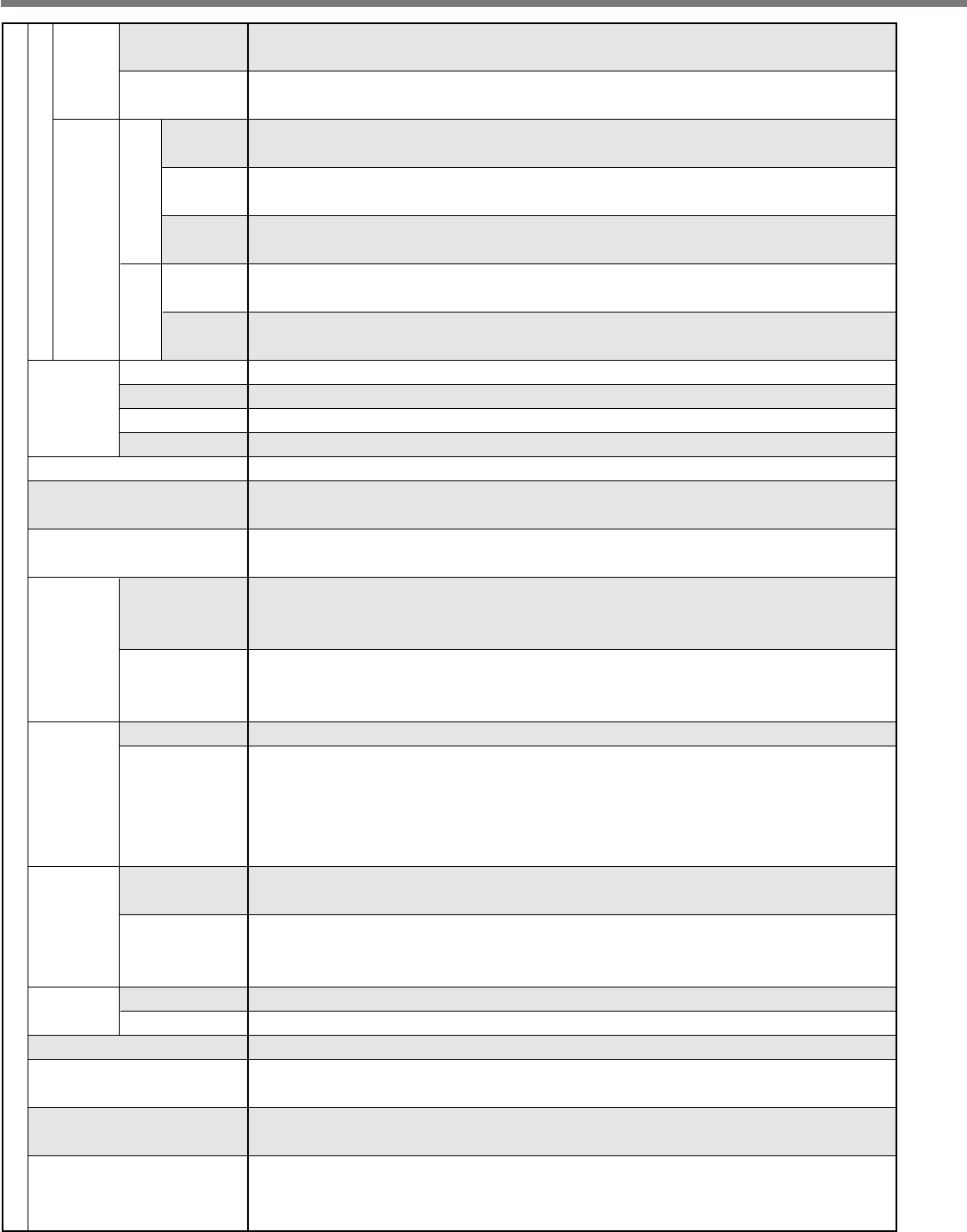
Specifications
Basic specifications
Operating : 0 to 55˚C, Storage : –20 to +80˚C
Both operating and storage : 90%RH or less (free from condensation)
1000m or lower
5.88m/s2 or less, 10 to 60Hz (No continuous use at resonance frequency)
IGBT PWM Sinusoidal wave drive
17-bit (131072 resolution) absolute/incremental encoder,
2500P/r (10000 resolution) incremental encoder
AT500 series by Mitutoyo (Resolution 0.05[µm], max. speed 2[m/s])
ST771 by Mitutoyo (Resolution 0.5[µm], max. speed 2[m/s])
10 inputs
(1) Servo-ON, (2) Control mode switching, (3) Gain switching/Torque limit switching, (4) Alarm clear
Other inputs vary depending on the control mode.
6 outputs
(1) Servo alarm, (2) Servo ready, (3) Release signal of external brake (4) Zero speed detection,
(5) Torque in-limit. Other outputs vary depending on the control mode.
3 inputs (16Bit A/D : 1 input, 10Bit A/D : 2 inputs)
2 outputs (for monitoring)
(1) Velocity monitor (Monitoring of actual motor speed or command speed is enabled. Select the
content and scale with parameter.), (2) Torque monitor (Monitoring of torque command,
(approx.. 3V/rated torque)), deviation counter or full-closed deviation is enabled.
Select the content or scale with parameter.)
4 inputs
Select the exclusive input for line driver or photo-coupler input with parameter.
4 outputs
Feed out the encoder pulse (A, B and Z-phase) or external scale pulse (EXA, EXB and
EXZ-phase) in line driver. Z-phase and EXZ-phase pulse is also fed out in open collector.
1 : 1 communication to a host with RS23 interface is enabled.
1 : n communication up to 15 axes to a host with RS485 interface is enabled.
(1) 5 keys (MODE, SET, UP, DOWN, SHIFT), (2) LED (6-digit)
A and B-frame : no built-in regenerative resistor (external resistor only) C to F-frame :
Built-in regenerative resistor (external resistor is also enabled.)
Setup of action sequence at Power-OFF, Servo-OFF, at protective function activation and
over-travel inhibit input is enabled.
Switching among the following 7 mode is enabled, (1) Position control, (2) Velocity control,
(3) Toque control, (4) Position/Velocity control, (5) Position/Torque control,
(6) Velocity/Torque control and (7) Full-closed control.
+10%
–15%
Input power
100V
200V
Main circuit
Control circuit
Control circuit
Main circuit
E and
F-frame
A to
D-frame
E and
F-frame
C and
D-frame
A and
B-frame
Environment
Temperature
Humidity
Altitude
Vibration
Control method
Encoder feedback
External scale feedback
Control
signal
Analog
signal
Pulse signal
Communication
function
Front panel
Regeneration
Dynamic brake
Control mode
Output
Input
Output
Input
Input
Output
RS232
RS485
Single phase, 200 – 230V 50/60Hz
+10%
–15%
Single phase, 200 – 240V 50/60Hz
+10%
–15%
3-phase, 200 – 230V 50/60Hz
+10%
–15%
Single/3-phase, 200 – 240V 50/60Hz
+10%
–15%
Single phase, 200 – 240V 50/60Hz
+10%
–15%
Single phase, 100 – 115V 50/60Hz
+10%
–15%
Single phase, 100 – 115V 50/60Hz