



















135
[Connection and setup of velocity control mode]
Connection and Setup of
Velocity Control Mode
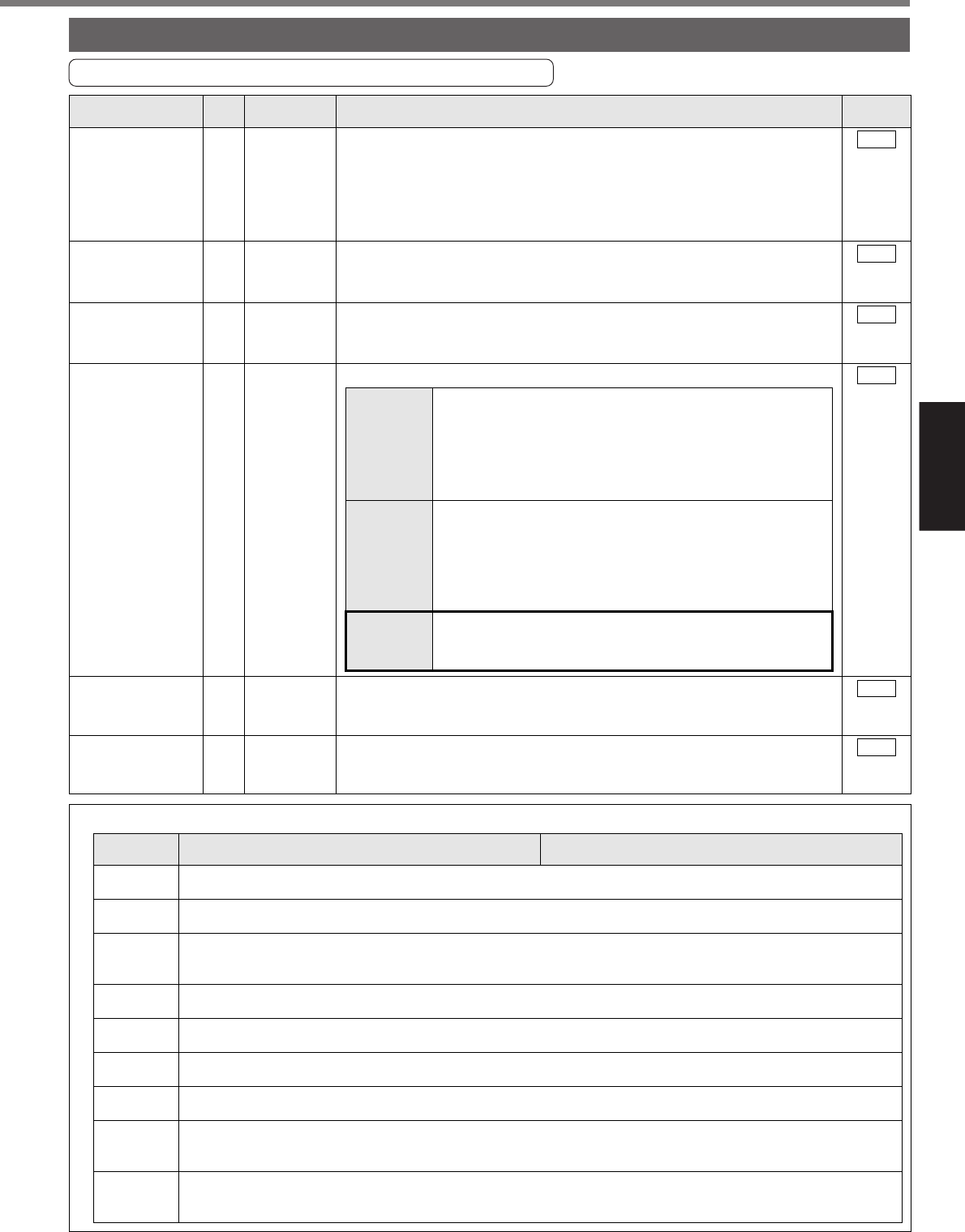
Output signal and Pin No. of the Connector, CN X5
Output Signals (Common) and Their Functions
0
1
2
3
4
5
6
7
8
X5 TLC : Output of Pin-40 X5 ZSP : Output of Pin-12
Title of signal
Pin No
Symbol Function
I/F circuit
External brake
release signal
11
10
SO1
P.129
BRKOFF+
BRKOFF–
•
Feeds out the timing signal which activates the electromagnetic brake of the motor.
• Turns the output transistor ON at the release timing of the electro-
magnetic brake.
• You can set up the output timing of this signal with Pr6A (Setup of
mechanical brake action at stall) and Pr6B (Setup of mechanical brake
action at motion). For details, refer to P42, "Timing Chart" of Preparation.)
Servo-Ready
output
35
34
SO1
P.129
S-RDY+
S-RDY–
• This signal shows that the driver is ready to be activated.
• Output transistor turns ON when both control and main power are ON but
not at alarm status.
Zero-speed
detection
output signal
12
(41)
SO2
P.129
ZSP
(COM–)
•
Content of the output signal varies depending on Pr0A (Selection of ZSP output).
• Default is 1, and feeds out the zero speed detection signal.
• For details, see the table below, "Selection of TLC,ZSP output".
Torque in-limit
signal output
40
(41)
SO2
P.129
TLC
(COM–)
•
Content of the output signal varies depending on Pr09 (Selection of TLC output).
• Default is 1, and feeds out the torque in-limit signal.
• For details, see the table below, "Selection of TLC,ZSP output".
Servo-Alarm
output
37
36
SO1
P.129
ALM+
ALM–
• This signal shows that the driver is in alarm status..
• Output transistor turns ON when the driver is at normal status, and turns
OFF at alarm status.
Positioning
complete
(In-position)
39
38
SO1
P.129
AT-SPEED+
AT-SPEED–
• Function varies depending on the control mode.
Position
control
Full-closed
control
Velocity/
Torque
control
• Output of positioning complete (COIN)
• The output transistor will turn ON when the absolute value
of the position deviation pulse becomes smaller than the
setup value of Pr60 (Positioning complete range).
• You can select the feeding out method with Pr63 (Setup of
positioning complete output).
• Output of full-closed positioning complete (EX-COIN)
• The output transistor will turn ON when the absolute value
of full-closed-position deviation pulse becomes smaller
than the setup value of Pr60 (Positioning complete range).
• You can select the feeding out method with Pr63 (Setup of
positioning complete output).
• Output at-speed (speed arrival) (AT-SPEED)
• The output transistor will turn ON when the actual motor
speed exceeds the setup value of Pr62 (In-speed).
• Selection of TCL and ZSP outputs
• Torque in-limit output (Default of X5 TLC Pr09)
The output transistor turns ON when the torque command is limited by the torque limit during Servo-ON.
• Zero-speed detection output (Default of X5 ZSP Pr0A)
The output transistor turns ON when the motor speed falls under the preset value with Pr61.
• Alarm signal output
The output transistor turns ON when either one of the alarms is triggered, over-regeneration alarm, overload alarm,
battery alarm, fan-lock alarm or external scale alarm.
• Over-regeneration alarm
The output transistor turns ON when the regeneration exceeds 85% of the alarm trigger level of the regenerative load protection.
• Over-load alarm
The output transistor turns ON when the load exceeds 85% of the alarm trigger level of the overload alarm.
• Battery alarm
The output transistor turns ON when the battery voltage for absolute encoder falls lower than approx. 3.2V.
• Fan-lock alarm
The output transistor turns ON when the fan stalls for longer than 1s.
• External scale alarm
The output transistor turns ON when the external scale temperature exceeds 65°, or signal intensity is not enough
(adjustment on mounting is required). Valid only at the full-closed control.
• In-speed (Speed coincidence) output
The output transistor turns ON when the difference between the actual motor speed and the speed command before
acceleration/deceleration reaches within the preset range with Pr61. Valid only at the velocity and torque control.
Value of
Pr09 or Pr0A