



















190
Outline of Full-Closed Control
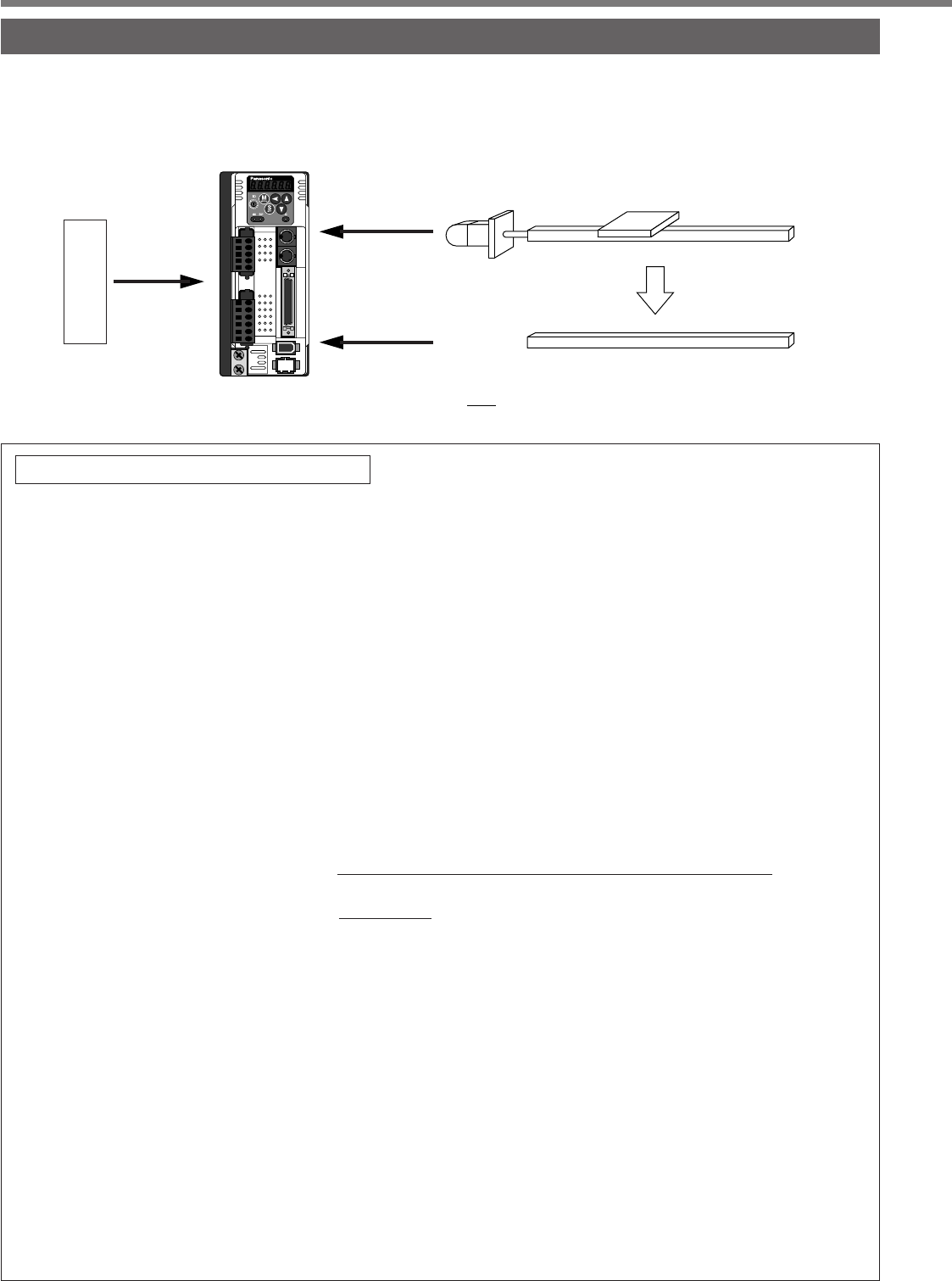
What Is Full-Closed Control ?
In this full-closed control, you can make a position control by using a linear scale mounted externally which
detects the machine position directly and feeds it back.. With this control, you can control without being
affected by the positional variation due to the ball screw error or temperature and you can expect to achieve
a very high precision positioning in sub-micron order.
Controller
Position
command
(Speed detection)
Position detection
Linear scale
We recommend the linear scale division ratio of
=
Linear scale division ratio
=
20
1
20
V
V
Cautions on Full-Closed Control
(1) Enter the command pulses making the external scale as a reference.
If the command pulses do not match to the external scale pulses, use the command division/multipli-
cation function (Pr48-4B) and setup so that the command pulses after division/multiplication is based
on the external scale reference.
(2) A4-series supports the linear scale of a communication type. Execute the initial setup of parameters
per the following procedures, then write into EEPROM and turn on the power again before using this
function.
<How to make an initial setup of parameters related to linear scale >
1) Turn on the power after checking the wiring.
2) Check the values (initial) feedback pulse sum and external scale feedback pulse sum with the front
panel or with the setup support software, PANATERM .
3) Move the work and check the travel from the initial values of the above 2).
4) If the travel of the feedback sum and the external scale feedback pulse sum are reversed in positive
and negative, set up the reversal of external scale direction (Pr7C) to 1.
5) Set up the external scale division ratio (Pr78-7A) using the formula below,
* If the design value of the external scale division ratio is obtained, set up this value.
6) Set up appropriate value of hybrid deviation excess (Pr7B) in 16 pulse unit of the external scale
resolution, in order to avoid the damage to the machine.
* A4-series driver calculates the difference between the encoder position and the linear scale posi-
tion as hybrid deviation, and is used to prevent the machine runaway or damage in case of the
linear scale breakdown or when the motor and the load is disconnected.
If the hybrid deviation excess range is too wide, detection of the breakdown or the disconnection
will be delayed and error detection effect will be lost. If this is too narrow, it may detect the normal
distortion between the motor and the machine under normal operation as an error.
* When the external scale division ration is not correct, hybrid deviation excess error (Err25) may
occur especially when the work travels long distance, even though the linear scale and the motor
position matches.
In this case, widen the hybrid deviation excess range by matching the external scale division ratio
to the closest value.
External scale division ratio =
Total variation of external scale feedback pulse sum
Total variation of feedback pulse sum
=
Pr78 x 2
Pr79
Pr7A