



















272
Absolute System
Enter the RSW value of the driver to which you want to communicate from the host to axis (*1 data) of the
command block, and transmit the command according to the RS232 communication protocol. For details
of communication, refer to P.278, "Communication".
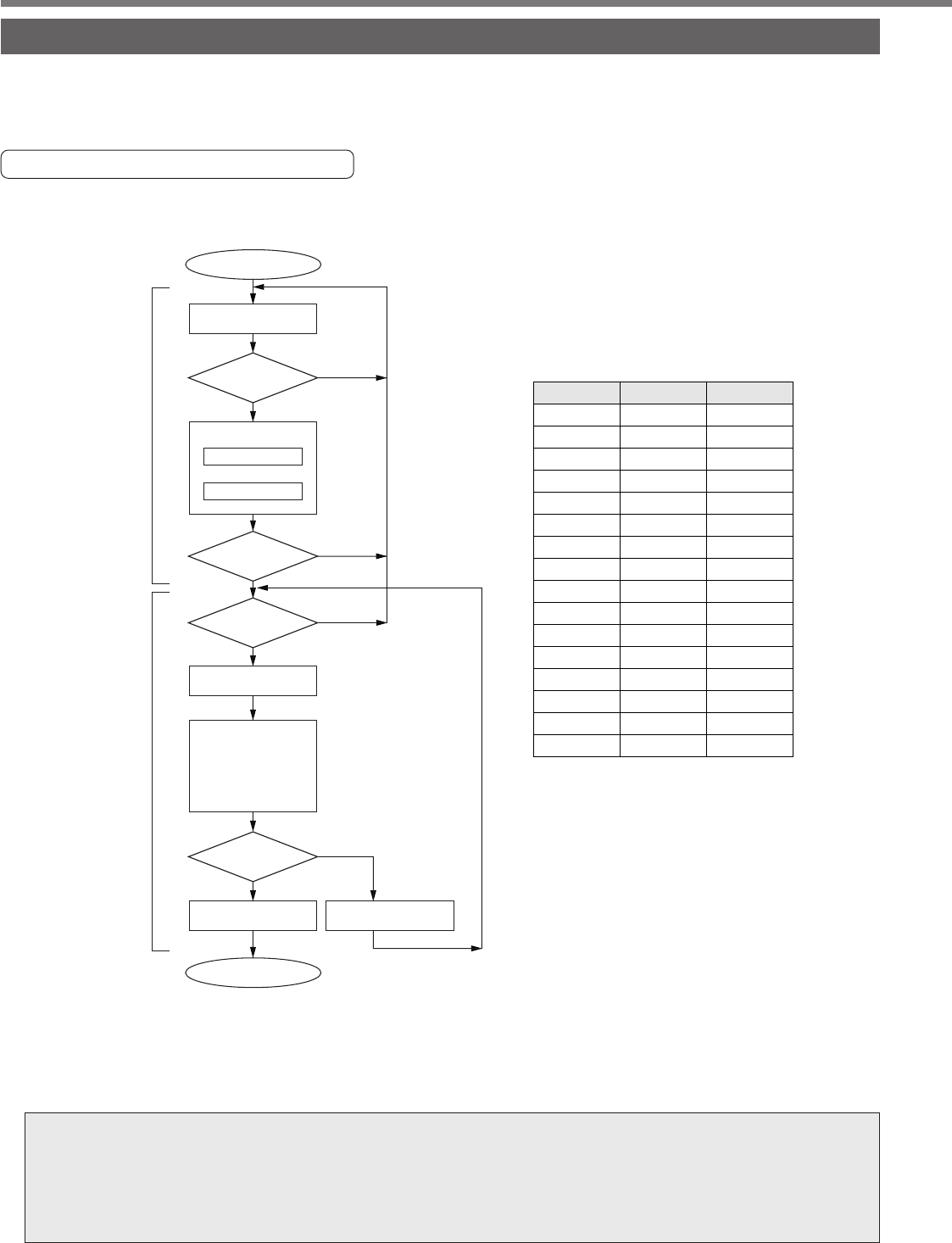
Transmission and Reception Sequence of Absolute Data
Servo-Ready output will be turned on 2sec. after the control power is turned on. Capture the absolute data
in the following communication protocol while the Servo-Ready output is on and the fix the motor with brake
by Servo-Off (when the motor is at complete stall.).
RS232 Communication Protocol
Refer to the instruction manual of the host for the transmission/reception method of command.
Transmission starts
N
N
N
N
Y
Y
Y
Y
transmission finishes
05h transmission
Host requests
for absolute
data to driver
Host receives
absolute data
from driver
04h transmission
06h transmission 15h transmission
Reception of
absolute data
(15 characters)
04h reception
06h reception
05h reception
Check sum
OK'ed reception
01h transmission
00h transmission
2Dh transmission
*
1
*
2
D2h transmission
Data of *1 and *2 are determined by the
setup of RSW (ID) of the front panel.
Check sum becomes OK'ed when the
lower 8-bit of the sum of the received
absolute data (15 characters) is 0.
RSW(ID)
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
Data of *1
00h
01h
02h
03h
04h
05h
06h
07h
08h
09h
0Ah
0Bh
0Ch
0Dh
0Eh
0Fh
Data of *2
2Eh
2Dh
2Ch
2Bh
2Ah
29h
28h
27h
26h
25h
24h
23h
22h
21h
20h
1Fh
• Allow 500ms or longer interval for axis switching when you want to capture multiple
axes data.
• It is recommended for you to repeat the above communication more than 2 times to
confirm the absolute data coincide, in order to avoid mis-operation due to unexpected
noise.