



















49
[Preparation]
Preparation
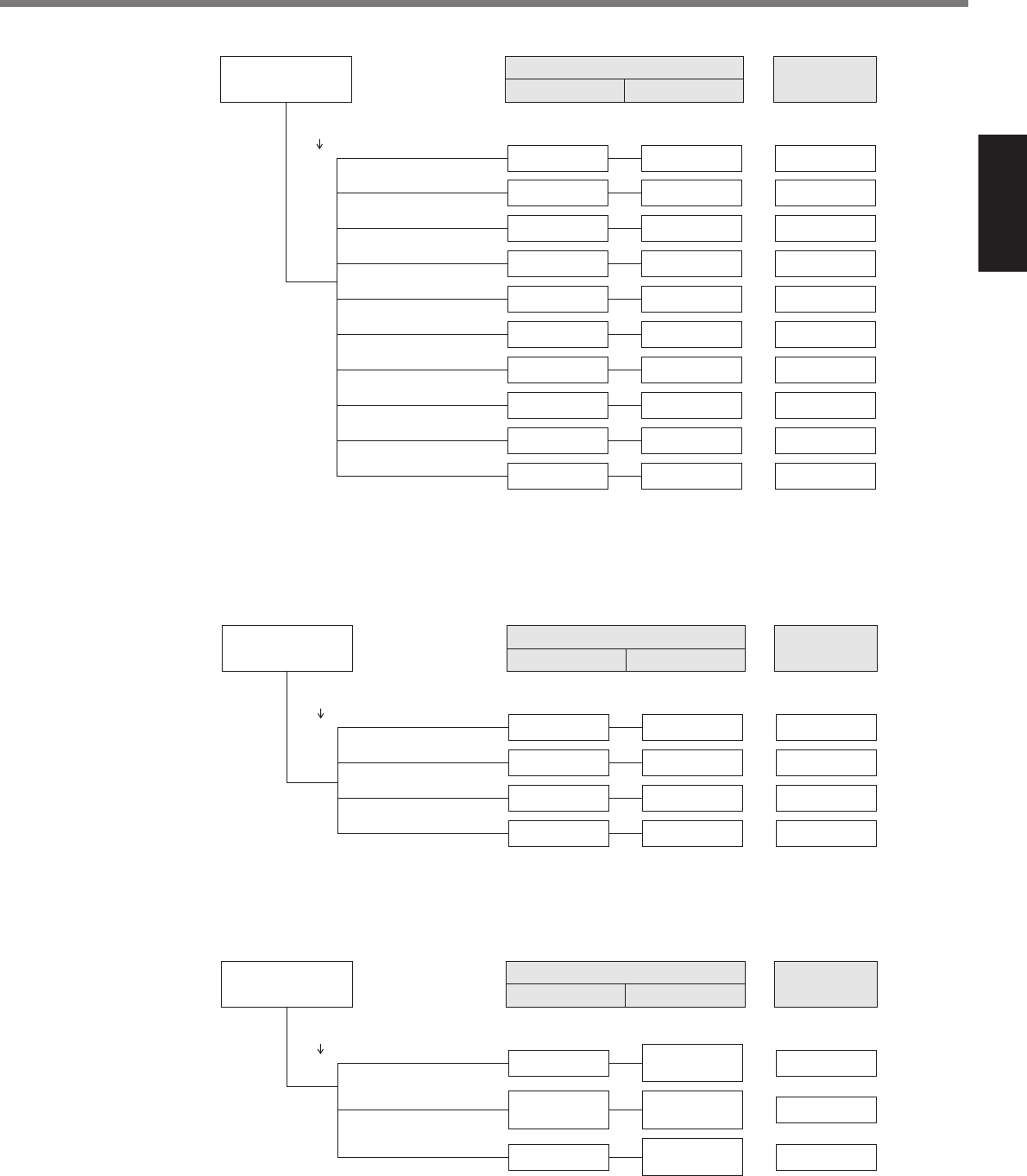
4) Setup of driving condition from deceleration to after stop by validation of over-travel inhibit
input (Pr66)
D B
D B
Free-run
Free-run
D B
Free-run
Free-run
D B
Hold
Hold
Hold
Hold
0
1
2
3
Setup value of Pr68
Sequence at main
Servo-OFF (Pr68)
Contents of
deviation
counter
Driving condition
During deceleration
after stalling
DB Hold
Hold
0
Setup value of Pr66
1
2
Sequence at over-travel
inhibit input (Pr66)
Contents of
deviation
counter
Driving condition
During deceleration
After stalling
Emergency stop
clear
Torque command to
inhibited direction is 0
Torque command to
inhibited direction is 0
Torque command to
inhibited direction is 0
Torque command to
inhibited direction is 0
2) Setup of driving condition from deceleration to after stop by Servo-OFF (Pr69)
3) Setup of driving condition from deceleration to after stop by activation of protective func-
tion (Pr68)
D B
D B
Free-run
Free-run
D B
D B
Free-run
Free-run
D B
Free-run
Free-run
D B
D B
Clear
Clear
Clear
Clear
Hold
Hold
Hold
Hold
Free-run
Free-run
D B
0
Setup value of Pr69
1
2
3
4
5
6
7
Sequence at main
Servo-OFF (Pr69)
Contents of
deviation
counter
Driving condition
During deceleration
after stalling
Emergency stop
Clear
D B
Emergency stop
Clear
Free-run
8
9
Torque limit value at emergency stop will be that of Pr6E (Setup of torque at emergency stop)
when the setup value is 8 or 9.
Torque limit value during deceleration will be that of Pr6E (Setup of torque at emergency stop)
when the setup value is 2.
Changes will be validated after the control power is turned on.
Deviation counter at activation of protective function will be cleared at alarm-clear.