



















224
Parameter Setup
7B
*
1 to 10000
<100>
16 x
external
scale
pulse
Setup of hybrid
deviation excess
• You can setup the permissible gap (hybrid deviation) between the
present motor position and the present external scale position.
• The driver will trip with Err25 (Hybrid deviation excess protection) when
the deviation is generated which exceeds the permissible gap.
7C
*
0 to 1
<0>
–Reversal of
direction of
external scale
You can set up the logic of the absolute data of the external scale.
<Caution>
When you use the linear scale by other manufacture than Mitutoyo,
position data will be kept as it is with the setup of 0, and it will become as
a reversed signed position data with the setup of 1.
78
*
79
*
7A
*
0 to 32767
<0>
0 to 17
<0>
1 to 32767
<10000>
–
–
–
Numerator of
external scale
division
Multiplier of
numerator of
external scale
division
Denominator of
external scale
division
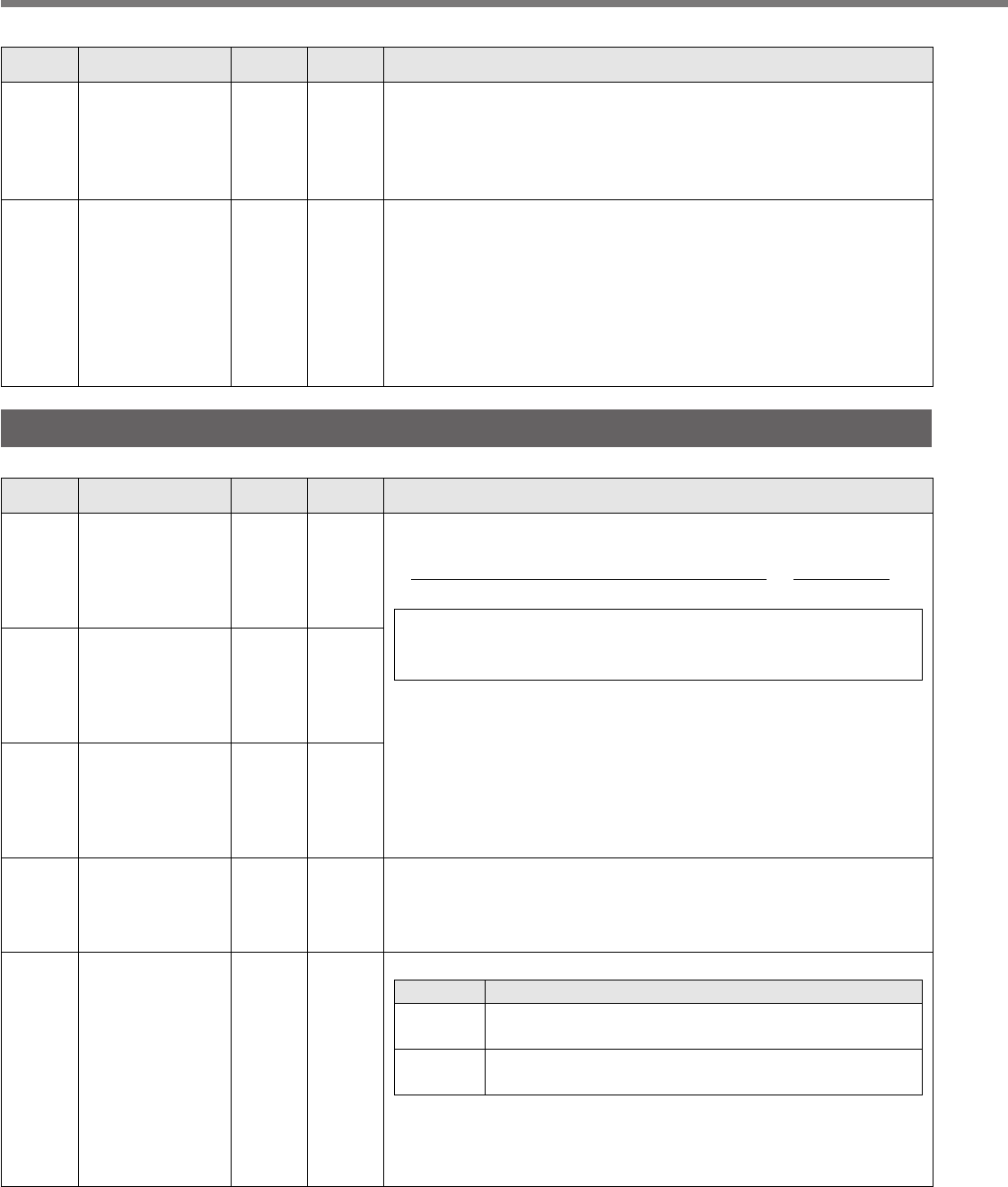
You can setup the ratio between the encoder resolution and the external
scale resolution at full-closed control.
• Pr78 ≠ 0,
Setup the ratio between the external scale resolution and the encoder
resolution per one motor revolution according to the above formula.
<Caution>
• Upper limit of numerator value after calculation is 131072. Setup
exceeding this value will be invalidated, and 131702 will be the actual
numerator.
• Pr78= <0> (default)
Numerator equals to encoder resolution, and you can setup
the external scale resolution per one motor revolution with Pr7A.
Encoder resolution per one motor revolution
External scale resolution per one motor revolution
Pr78 X 2
Pr79
Pr7A
=
Setup value
0
1
Content
Serial data will increase when the detection head travels
to the right viewed from the mounting side. (+ count)
Serial data will decrease when the detection head travels
to the right viewed from the mounting side. (– count)
72 0 to 500
<0>
%Setup of
over-load level
• You can set up the over-load level. The overload level becomes 115 [%]
by setting up this to 0.
• Use this with 0 setup in normal operation. Set up other value only when
you need to lower the over-load level.
•
The setup value of this parameter is limited by 115[%] of the motor rating.
73
0 to 20000
<0>
r/minSetup of
over-speed level
• You can set up the over-speed level. The over-speed level becomes 1.2
times of the motor max. speed by setting up this to 0.
• Use this with 0 setup in normal operation. Set up other value only when
you need to lower the over-speed level.
• The setup value of this parameter is limited by 1.2 times of the motor
max. speed.
<Caution>
The detection error against the setup value is ±3 [r/min] in case of the 7-wire
absolute encoder, and ±36 [r/min] in case of the 5-wire incremental encoder.
Standard default : < >
PrNo.
Setup
range
UnitTitle Function/Content
Standard default : < >
PrNo.
Setup
range
UnitTitle Function/Content
Parameters for Full-Closed Control
<Notes>
•For parameters which No. have a suffix of "*", changed contents will be validated when you turn on the
control power.