



















53
[Preparation]
Preparation
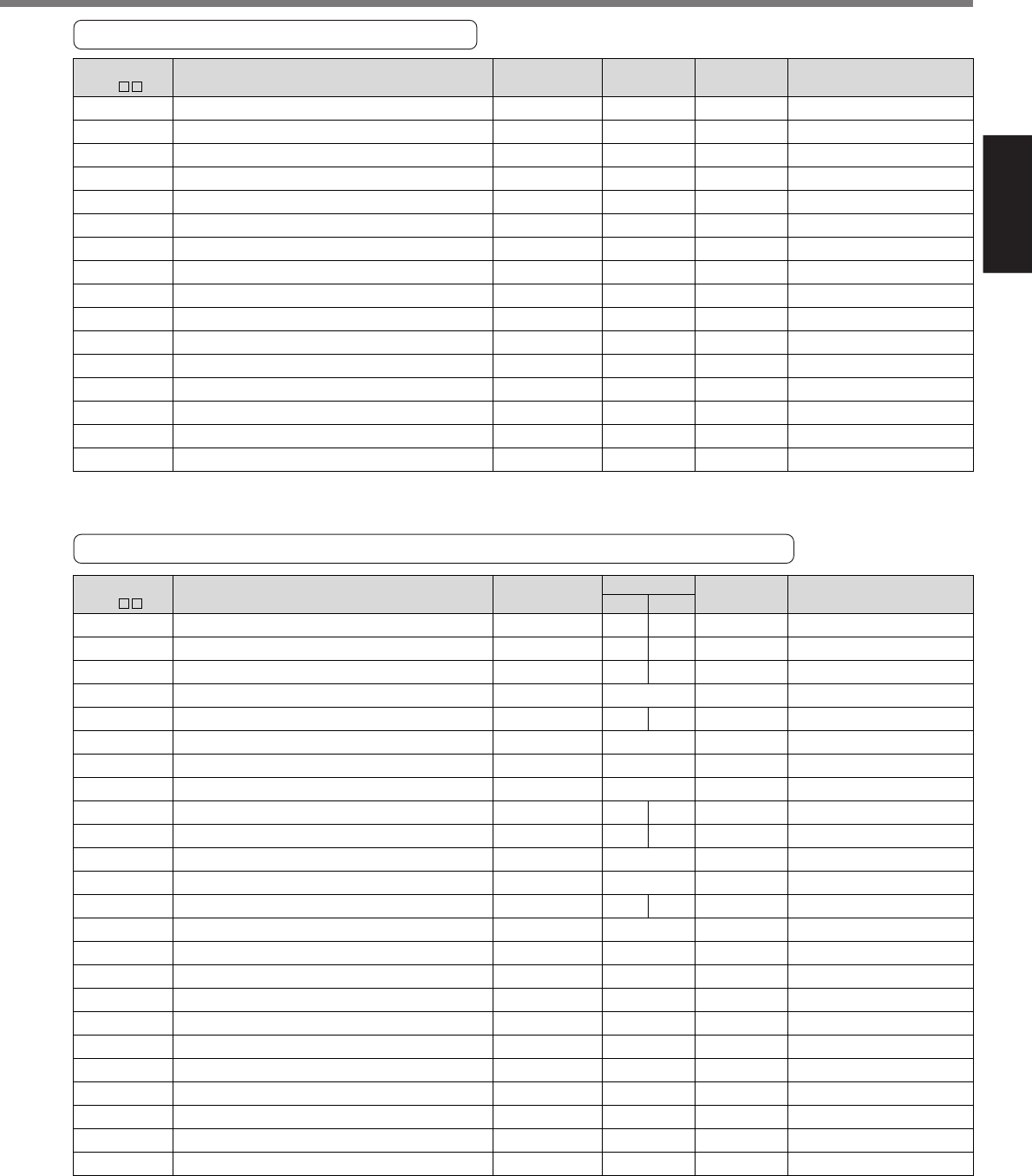
Parameters for Adjustment of Time Constant for Gains and Filters
Parameters for Functional Selection
• For parameters which default values are parenthesized by "< >", default value varies automatically by the
real-time auto-gain tuning function. Set up Pr21 (Setup of Real-time auto-gain tuning mode) to 0 (invalid)
when you want to adjust manually.
• For parameters with suffix of "*1", change will be validated after the reset of the control power.
00 *1
01 *1
02 *1
03
04 *1
05
06
07
08
09
0A
0B *1
0C *1
0D *1
0E *1
0F
0 to 15
0 to 17
0 to 6
0 to 3
0 to 2
0 to 3
0 to 2
0 to 9
0 to 12
0 to 8
0 to 8
0 to 2
0 to 5
0 to 5
0 to 1
–
1
1
1
1
1
0
0
3
0
0
1
1
2
2
0
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
all
all
all
P, S, F
all
S
S, T
all
all
all
all
all
all
all
all
–
Address of axis
Initial display of LED
Setup of control mode
Selection of torque limit
Setup of over-travel inhibit input
Switching of Internal/External speed setup
Selection of ZEROSPD input
Selection of speed monitor (SP)
Selection of torque monitor (IM)
Selection of TLO output
Selection of ZSP output
Setup of absolute encoder
Baud rate setup of RS232
Baud rate setup of RS485
Setup of front panel lock
(For manufacturer's use)
Set up of parameter Range Unit Related Control Mode
Parameter No.
(Pr )
Default
Set up of parameter Range Unit Related Control Mode
Parameter No.
(Pr )
Default
10
11
12
13
14
15
16
17
18
19
1A
1B
1C
1D
1E
1F
27
28
29
2A
2B
2C
2D
2E
0 to 3000
1 to 3500
1 to 1000
0 to 5
0 to 2500
–2000 to 2000
0 to 6400
–
0 to 3000
1 to 3500
1 to 1000
0 to 5
0 to 2500
100 to 1500
0 to 4
–
0 to 1
100 to 1500
0 to 4
0 to 99
0 to 2000
–200 to 2000
0 to 2000
–200 to 2000
<63><32>
<35><18>
<16><31>
<0>
<
65>
<
126>
<300>
<50>
–
<
73><38>
<35><18>
<1000>
<0>
<
65>
<
126>
1500
2
–
<0>
1500
2
0
0
0
0
0
1/s
Hz
ms
–
0.01ms
0.1%
0.01ms
–
1/s
Hz
ms
–
0.01ms
Hz
–
–
–
Hz
–
–
0.1Hz
–
0.1Hz
–
P, F
all
all
all
all
P, F
P, F
–
P, F
all
all
all
all
all
all
–
P, S
all
all
all
P, F
P, F
P, F
P, F
1st gain of position loop
1st gain of velocity loop
1st time constant of velocity loop integration
1st filter of velocity detection
1st time constant of torque filter
Velocity feed forward
Time constant of feed forward filter
(For manufacturer's use)
2nd gain of position loop
2nd gain of velocity loop
2nd Time constant of velocity loop integration
2nd filter of velocity detection
2nd torque filter time constant
1st notch frequency
Selection of 1st notch width
(For manufacturer's use)
Setup of instantaneous velocity observer
2nd notch frequency
Selection of 2nd notch width
Selection of 2nd notch depth
1st damping frequency
Setup of 1st damping filter
2nd damping frequency
Setup of 2nd damping filter
A to C-frame D to F-frame