



















Page 16-7
2x
1
’(t) + x
2
’(t) = 0.
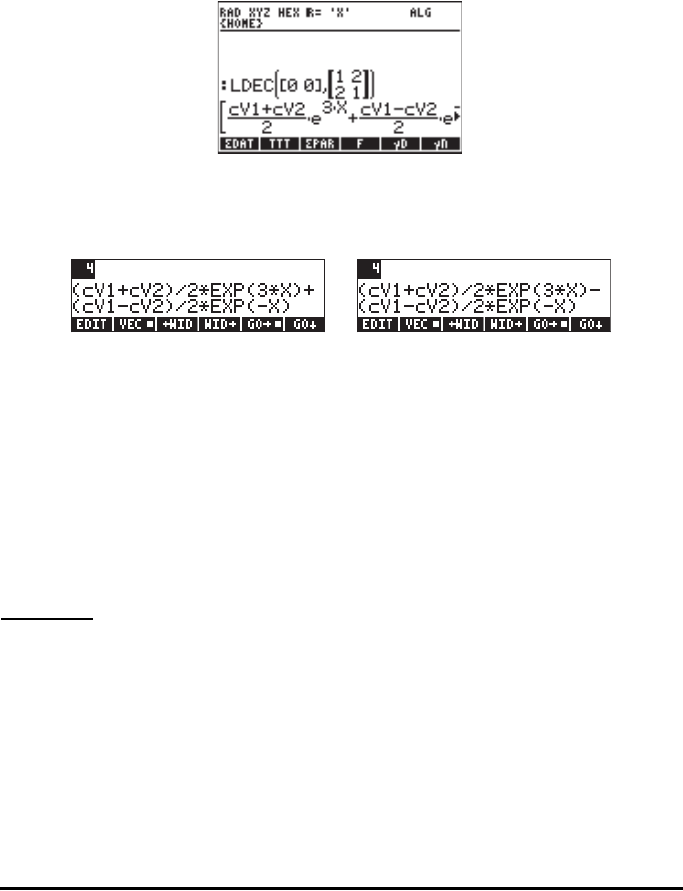
In algebraic form, this is written as: A⋅x’(t) = 0, where . The
system can be solved by using function LDEC with arguments [0,0] and matrix
A, as shown in the following screen using ALG mode:
The solution is given as a vector containing the functions [x
1
(t), x
2
(t)]. Pressing
˜ will trigger the Matrix Writer allowing the user to see the two components
of the vector. To see all the details of each component, press the @EDIT! soft
menu key. Verify that the components are:
Function DESOLVE
The calculator provides function DESOLVE (Differential Equation SOLVEr) to
solve certain types of differential equations. The function requires as input the
differential equation and the unknown function, and returns the solution to the
equation if available. You can also provide a vector containing the differential
equation and the initial conditions, instead of only a differential equation, as
input to DESOLVE. The function DESOLVE is available in the CALC/DIFF
menu. Examples of DESOLVE applications are shown below using RPN mode.
Example 1
– Solve the first-order ODE:
dy/dx + x
2
⋅y(x) = 5.
In the calculator use:
'd1y(x)+x^2*y(x)=5' ` 'y(x)' ` DESOLVE
The solution provided is
{‘y = (INT(5*EXP(xt^3/3),xt,x)+cC0)*1/EXP(x^3/3)}’ }, i.e.,
⎥
⎦
⎤
⎢
⎣
⎡
=
12
21
A