IFB Usage Considerations
10-8 Intel® 460GX Chipset Software Developer’s Manual
Software at this stage needs to determine if at least one of the above modes is supported by the
drive. Software should initially determine a drive’s best PIO w/IORDY capability (PIO4 w/IORDY
or PIO3 w/IORDY) initially. If these PIO w/IORDY modes are not supported, the drive should
determine the PIO2 mode support with IORDY or PIO2 mode support without IORDY. Otherwise,
Compatible timings should be applied to the drive.
The drive’s PIO w/IORDY mode capability is specified in the IDENTIFY_DRIVE buffer, Words
64 and 68. Software must first check to see that the Words 64-70 are valid before determining the
drive’s PIO w/IORDY drive capability.
The drive’s PIO2 mode capability and current configuration are specified in the
IDENTIFY_DRIVE buffer, Word 51.
To determine the drive’s best PIO capability ensure that the drive reports the capability and is able
to transfer at the target cycle time:
Note: The cycle times associated with the various timing modes are defined by the ATA Specification. A
drive that reports a given PIO capability must be capable of supporting the minimum cycle time for
that mode.
Note: If a drive does not report a PIO cycle time that is consistent with the Target PIO Cycle Time, a
slower speed should be chosen.
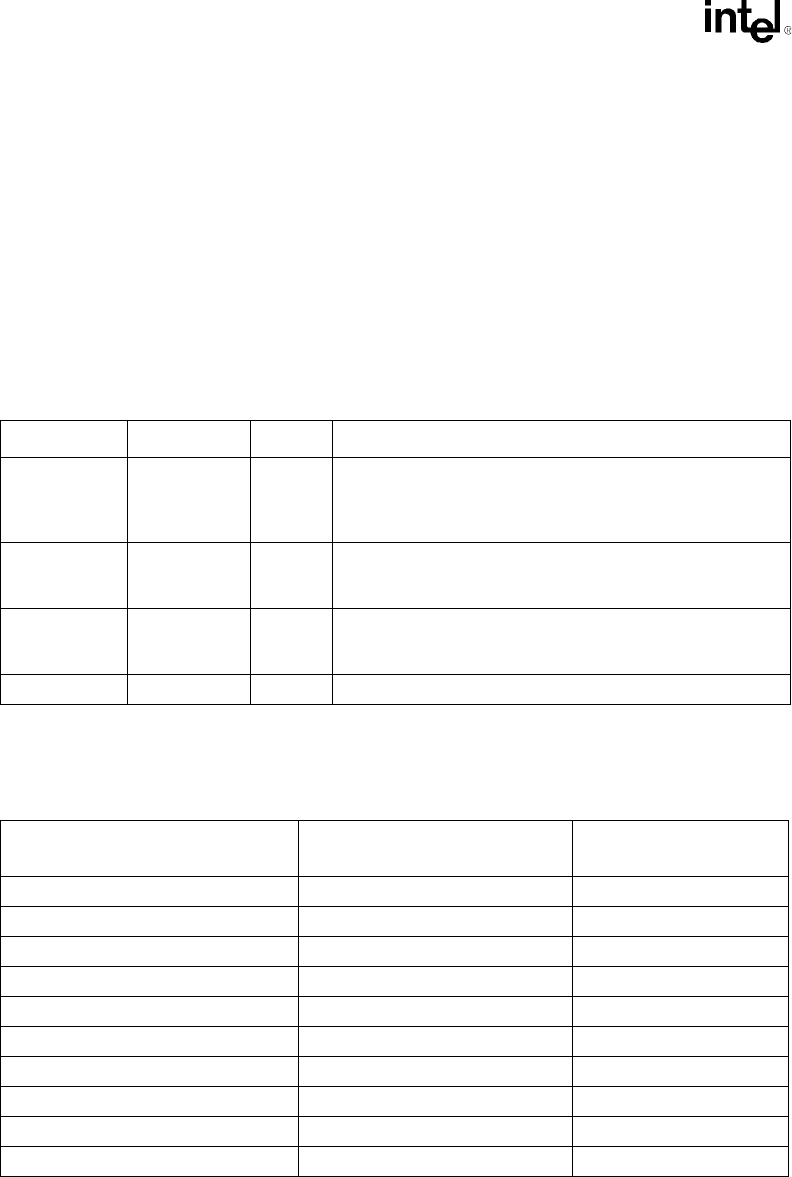
Table 10-5. Identify Device Information Used for Determining PIO Drive Capabilities
Capability Word Offset Bits Field
PIO 51 15:8 PIO Data Transfer Cycle Timing Mode Supported
00h: PIO0
01h: PIO1
02h: PIO2
PIO, DMA 53 1 Field Validity
0: the fields reported in words 64-70 are not valid
1: the fields reported in word 64-70 are valid
PIO 64 7:0 Advanced Flow Control PIO Transfer Modes Supported
bit 0: PIO3 (w/IORDY Flow Control)
bit 1: PIO4 (w/IORDY Flow Control)
PIO 68 15:0 Minimum PIO Transfer Cycle Time with IORDY Flow Control
Table 10-6. Drive PIO Capability as a Function of Cycle Time
Drive’s Reported PIO Mode Setting
Drives Reported PIO
Cycle Time
Drive’s Best PIO Mode
PIO4 t <= 120ns PIO4
PIO4 120 < t <= 180ns PIO3
PIO4 180 < t <= 240ns PIO2
PIO4 t > 240ns PIO0/Compatible
PIO3 t <= 180ns PIO3
PIO3 180 < t <= 240ns PIO2
PIO3 t > 240ns PIO0/Compatible
PIO2 N/A (drive must support t<= 240ns) PIO2
PIO1 N/A PIO0/Compatible
PIO0/Compatible N/A PIO0/Compatible







































































































































































































































































































