
















Appendix H
ES100j Digital Controller Protocol
260
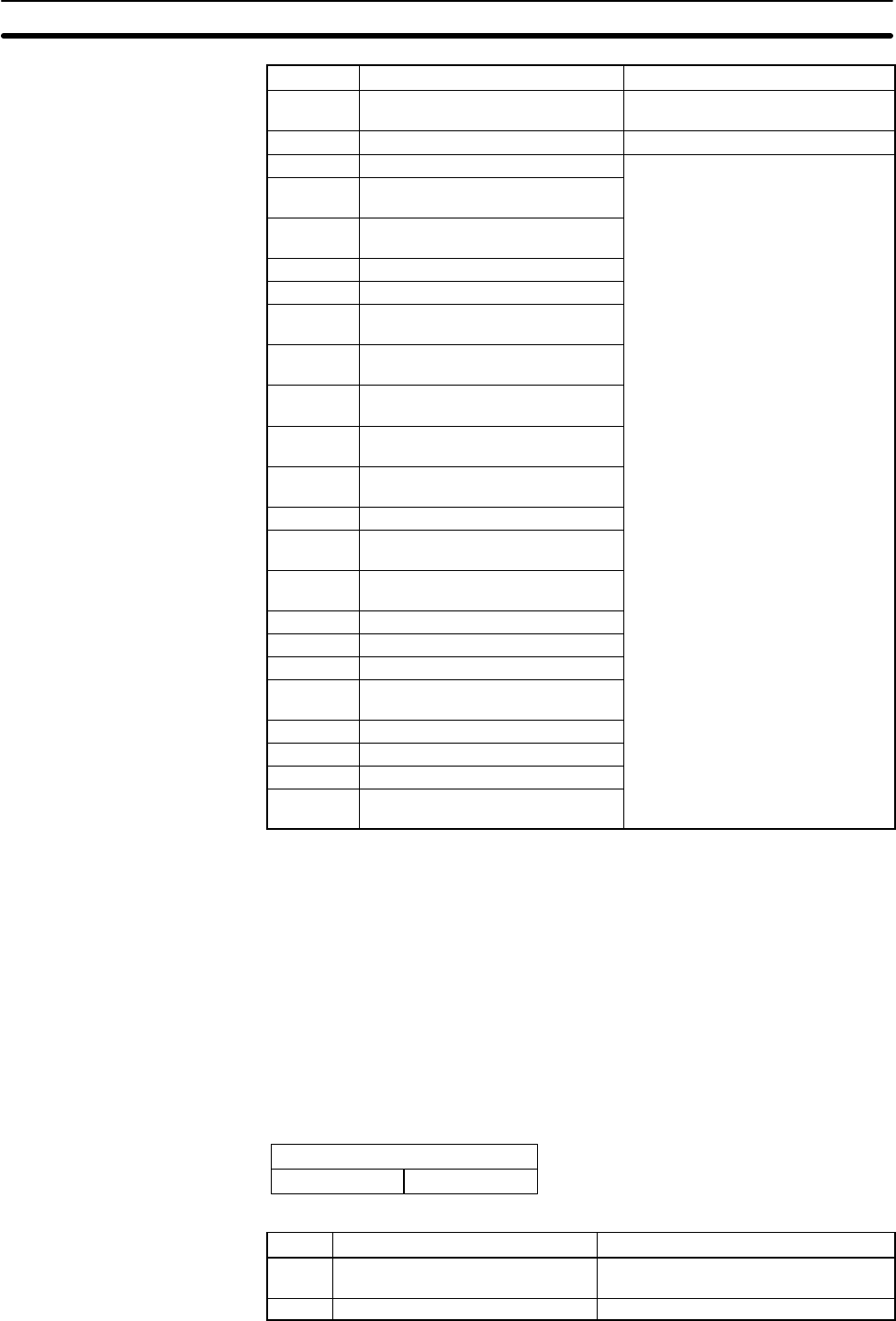
Offset Contents (data format) Data
+0 Number of send data words
(4 digits BCD)
0044 (fixed)
+1 Unit No. (2 digits BCD) 00 to 31
+2 to 3 Fixed SP (8 digits BCD)
00000000 to 09999000
+4 to 5 Control output 1 pulse cycle
(8 digits BCD)
+6 to 7 Control output 2 pulse cycle
(8 digits BCD)
+8 to 9 Fuzzy strength (8 digits BCD)
+10 to 11 Cooling coefficient (8 digits BCD)
+12 to 13 Heater burnout alarm setting
(8 digits BCD)
+14 to 15 Position-proportional dead band
(8 digits BCD)
+16 to 17 Switching output hysteresis
(8 digits BCD)
+18 to 19 ON/OFF count alarm setting
(8 digits BCD) value
+20 to 21 ON/OFF control hysteresis
(8 digits BCD)
+22 to 23 Manual reset (8 digits BCD)
+24 to 25 SP setting lower limit
(8 digits BCD)
+26 to 27 SP setting upper limit
(8 digits BCD)
+28 to 29 SP rise rate limit (8 digits BCD)
+30 to 31 SP fall rate limit (8 digits BCD)
+32 to 33 MV rate-of-change limit (8 digits BCD)
+34 to 35 Secondary loop fixed SP
(8 digits BCD)
+36 to 37 Secondary loop P (8 digits BCD)
+38 to 39 Secondary loop I (8 digits BCD)
+40 to 41 Secondary loop D (8 digits BCD)
+42 to 43 Secondary loop manual reset
(8 digits BCD)
Receive Data Word Allocation (3rd Operand of PMCR)
None.
Read PID Control Parameters 1 (Sequence No. 260)
Reads PID parameters No. 1 to 4 from PID control parameters in the parameter area and stores the results in the
specified words.
Send Data Word Allocation (2nd Operand of PMCR)
First word of
send data
Number of send data words+0
+1
(Undefined)
Unit No.
Offset Contents (data format) Data
+0 Number of send data words
(4 digits BCD)
0002 (fixed)
+1 Unit No. (2 digits BCD) 00 to 31