



















LOCAL BUS INTERFACE
HOLD
....
SSERTED
Bus
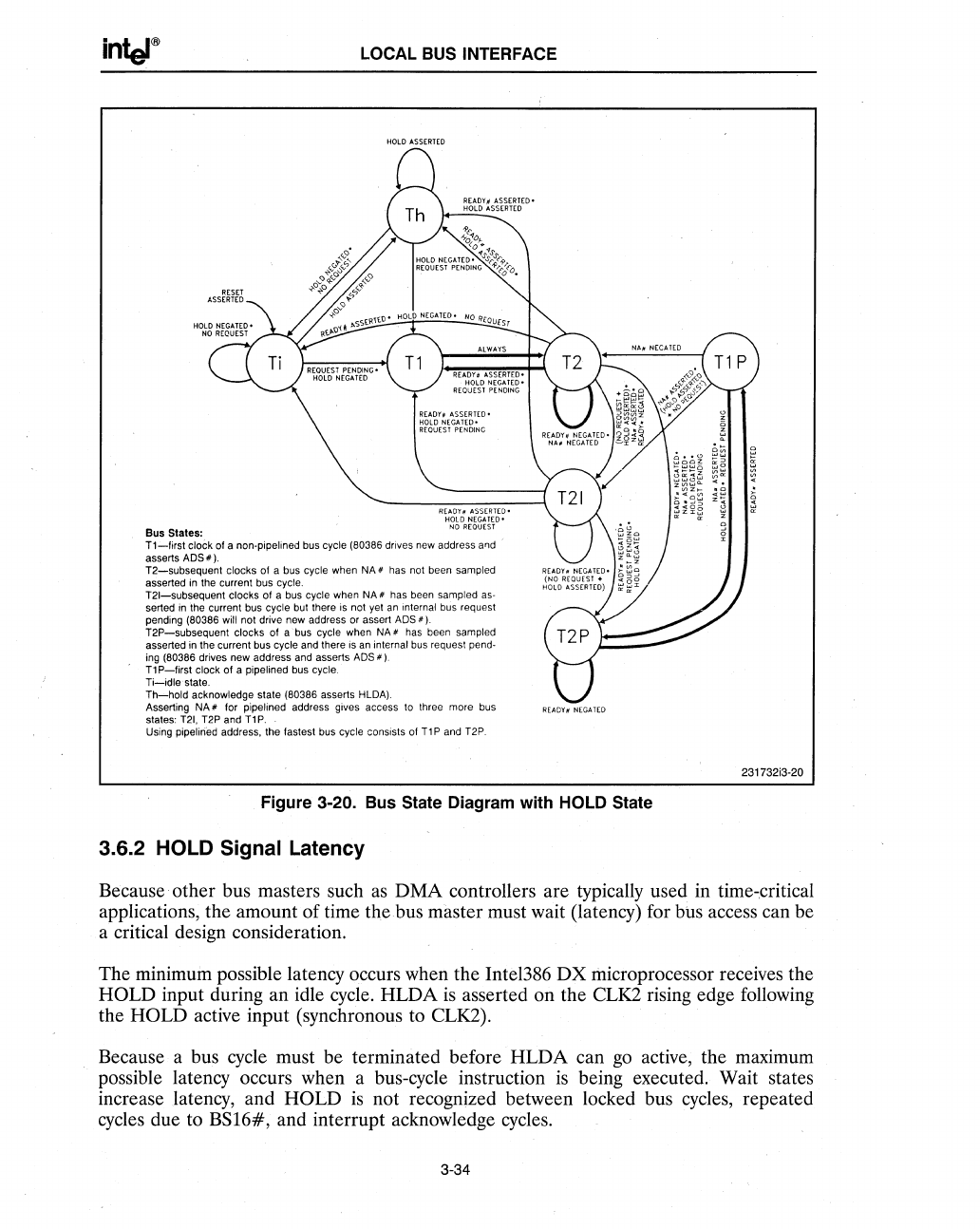
States:
READY" ASSERTED-
HOLD NEGATEO-
NO
REOUEST
T1-fjrst
clock of a non·pipelined bus cycle (80386 drives new address
811d
'
asserts ADS
#).
T2-subsequenl
clocks of a bus cycle when NA # has not been sampled
asserted in the current bus cycle.
T21-subsequent
clocks of a bus cycle when NA # has been sampled as-
serted
in
the current bus cycle but there is not yet
an
internal bus request
pending
(80386 will not drive new address or assert ADS
#).
T2P-subsequent
clocks of a bus cycle when
NA'
has been sampled
asserted in the current bus
cycle and there is
an
internal bus request pend-
ing (80386 drives new address and asserts
ADS').
T1
P-first
clock
01
a pipe lined bus cycle.
Ti-idle
state.
Th-hold
acknowledge state (80386 asserts HLDA).
Asserting
NA
#"
for pipelined address gives access
to
three more
bus
states:
T21,
T2P and
T1
P.
Using pipelirfed address, the fastest bus cycle consists of
T1
P and T2P.
READY# NEGAT[O
Figure 3-20. Bus State Diagram with HOLD State
3.6.2 HOLD Signal Latency
231732i3-20
Because other bus masters such
as
DMA controllers are typically used in time-.critical
applications, the amount of time the bus master must wait (latency) for
bus access can be
a critical design consideration.
The minimum possible latency occurs when the Inte1386
DX
microprocessor receives the
HOLD input during an idle cycle. HLDA
is
asserted on the CLK2 rising edge following
the
HOLD active input (synchronous to CLK2).
Because a bus cycle must be terminated before HLDA can
go
active, the maximum
possible latency occurs
when a bus-cycle instruction
is
being executed. Wait states
increase latency, and
HOLD
is
not recognized between locked bus cycles, repeated
cycles
due to BS16#, and interrupt acknowledge cycles.
3-34