



















456
CHAPTER 21 CAN CONTROLLER
21.4.3 Correspondence between Node Status Bit and Node
Status
Node status bit shows the node status by two bits (NS1 and NS0).
■ Correspondence between Node Status Bit and Node Status
Note:
Warning (error active) is included in the error active in CAN Specification 2.0B for the node status,
however, indicates that the transmit error counter or receive error counter has exceeded 96. The node
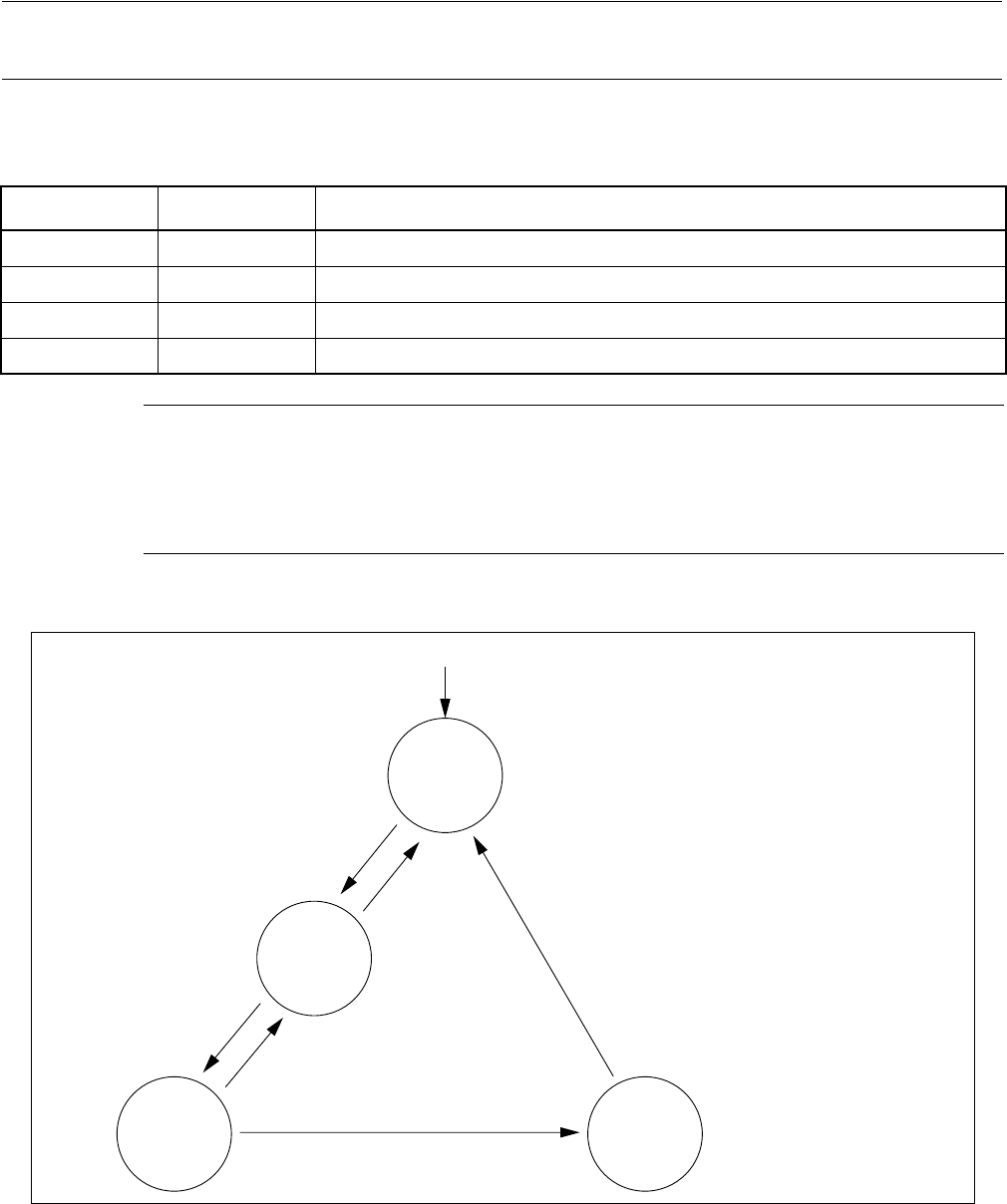
status change diagram is shown in Figure 21.4-3 .
Figure 21.4-3 Node Status Transition Diagram
Table 21.4-3 Correspondence between NS1 and NS0 and Node Status
NS1 NS0 Node status
00Error active
0 1 Warning (error active)
1 0 Error passive
1 1 Bus off
Error active
Hardware reset
Error passive
TEC ≥ 256
REC < 96
and TEC < 96
After 0 has been written to the HALT bit of
the register (CSR), continuous 11-bit High
levels (recessive bits) are input 128 times
to the the shift.
It is necessary to cancel the bus operation halt for the shift.
REC: Receive error counter
TEC: Transmit error counter
REC < 128
and TEC < 128
REC ≥ 96
or TEC ≥ 96
REC ≥ 128
or TEC ≥ 128
Bus off
(HALT=1)
Warning
(Error active)