



















3. Service menu
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
3 - 63
It calculates the transfer data from the 3 reference step of Program A and B..
Screen display
Contents of window
Source 3 points program : Program number where the program has 3 steps that are
reference steps and needed for coordinate conversion.(Example <Program A>)
Destin 3 points program : Program number where the program has 3 steps that are needed
to define destination coordinate. (Example <Program B>)
Source program : Enter the number of program where the actual teaching job is
recorded( Example <Program 1>)
Destination program : Enter the program number which converts program having teaching
point.(Example <Program 2>)
Reference
⑴ The accurate teaching to the 3 reference point has great effect on the accuracy of the
coordination transfer.
⑵ Please do not move on a large degree the posture of the wrist axis when you teach
the 3 reference point.
⑶ The distance between the 3 reference point shall have a great distance way as
far as possible.
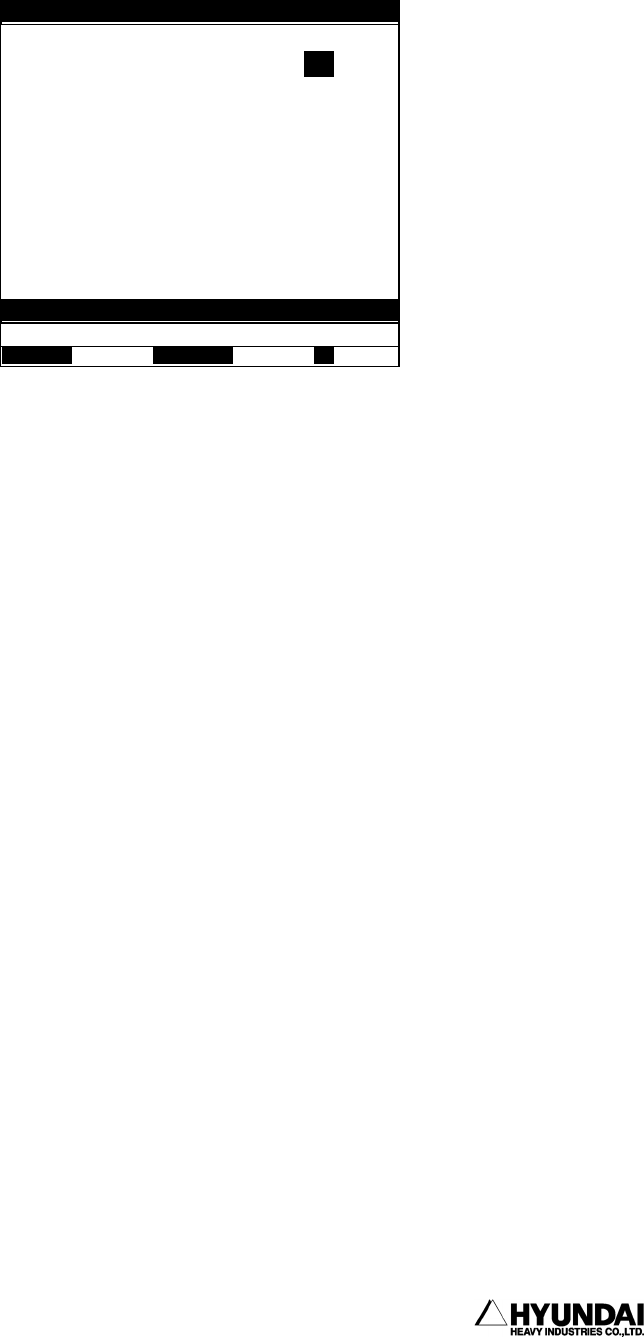
14:39:38 *** Coord Transf *** A:0 S:4
Reference point program
Source 3 points program = [ 0]
Destin 3 points program = [999]
Object program
Source program = [ 0]
Destination program = [999]
(In case of language-type program, only
HIDDEN-POSE steps will be converted.)
Enter number and
p
ress
[
SET
]
>
[
1 - 999
]