



















6. System setting
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
6 - 53
Tool no. to be set : Input the tool number that you want to set again.
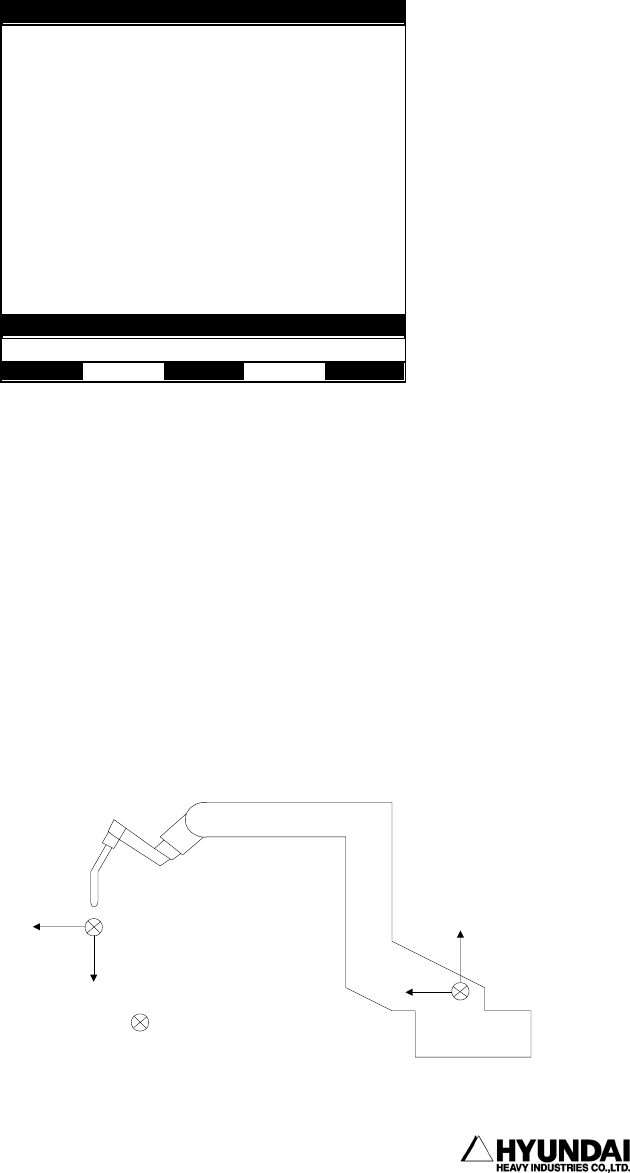
⑵ Angle calibration
Outline
It executes the calibration, angle setting of the tool.
You should select “ Angle calibration” [PF2] key.
Screen display
Operation method
Please press "Execute [PF5]" after the direction of X, Y, Z of tool coordination
that you want to define move the position of the robot to coincide with the direction
of X, -Z, Y.
At this time, the direction that the tool end is gong to move is the direction of
the tool coordination system.
Reference
14:39:38 ***TOOL ANGLE SET
g
*** A:0S:4
By jogging, let the tool be parallel to
z-axis at any point directing downward.
Then, Press PF5[Execute].
/ _____ :--->Torch
/://--HH: H:H
: // HH: H:H
: HH: Body H:H
Torch HH- H H -->Body
H==H_ H H
Side H H Front H H
-view ----- -view ------
Ad
j
ust an
g
le b
y
j
o
gg
in
g,
then
p
ush PF5
>
Execute
Z
tool
Y
tool
Z
robot
Y
robot
Position of the robot
for tool angle calibration and setting
Direction from
outside of screen to
inner side of screen