



















11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 6
11.1.6 Variable
11.1.6.1 Global variable
It can be shared and used in whole program.
Reference
(1) Pose type elements and shift type elements are dealt as real number type.
(2) The number of pose element T1, T2... should be matched with the number of additional
axis.
(3) When pose is encoder type, (S, H, V, R2, B, R1) elements can be accessed by using each
X, Y, Z, RX, RY, RZ.
(4) At the time when controller's system is initialized, all arithmetics type variables,
pose and variable elements become 0, and string variables are initialized to blank string.
It is not initialized automatically when the cycle begins and program is changed.
(5) All variables are reserved even though the power is turned off.
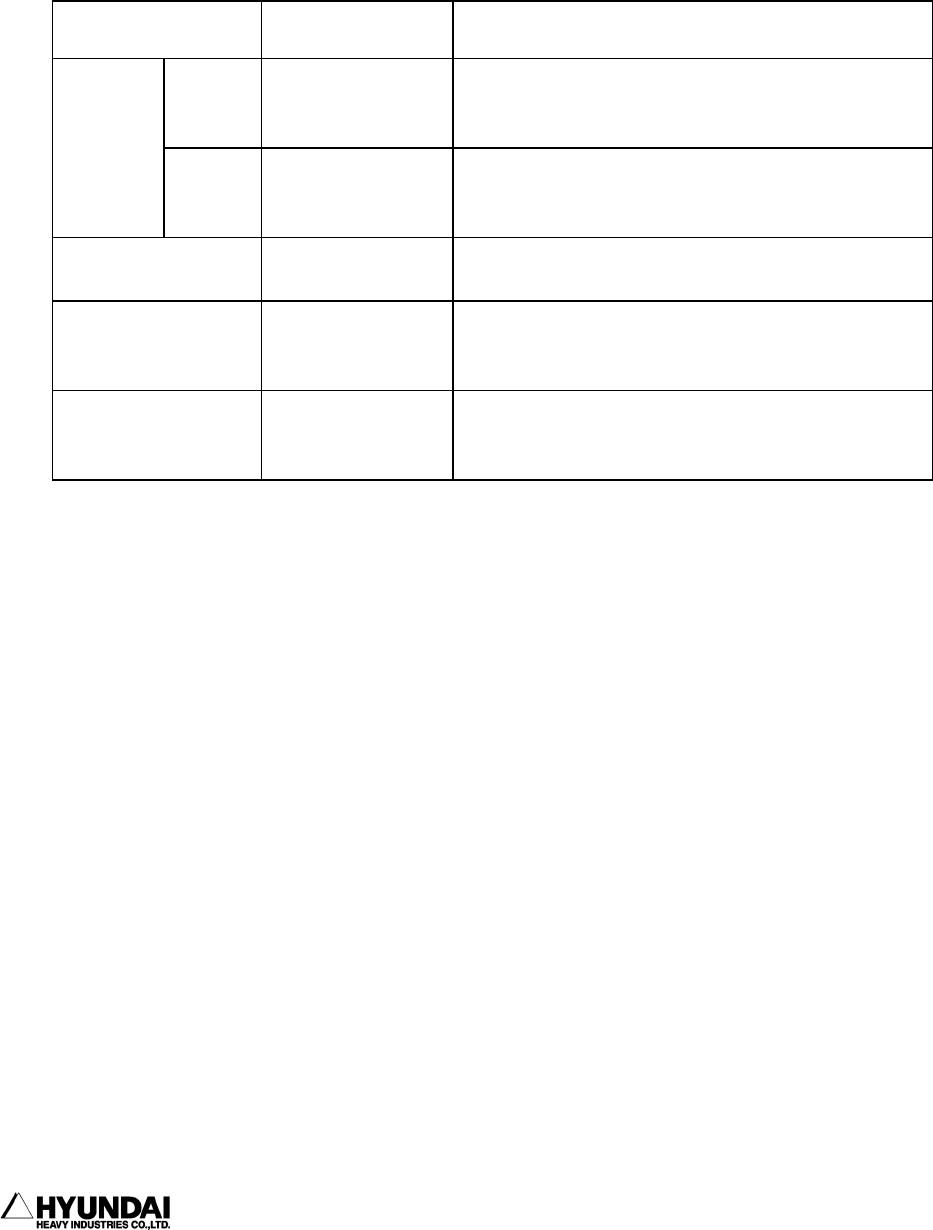
variable type grammar example
contsant
V1%∼V400% or
V%[1]∼V%[400]
V10%, V%[20], V%[50+V2%]
(The type of numerical formula can be written in
[ ].)
arithmetic
real
number
V1!∼V400! or
V![1]∼V![400]
V10!, V![20], V![50+V2%]
strings
V1$∼V40$ or
V$[1]∼V$[40]
V10$, V$[20], V$[V2%]
pose
P1∼P999 or
P[1]∼P[999]
P50, P[70], P[50+V2$] , P[20].RZ, P[10].X
(The access to the elements (X, Y, Z, RX, RY, RZ,
T1, T2,... T6, CFG) are available.)
shift
R1∼R100 or
R[1]∼R[100]
R20, R[30], R[20+V2$], R[20].RZ, R[10].X
(The access to the elements (X, Y, Z, RX, RY, RZ)
are available.)