



















2. Basic operation
-----------------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------
2 - 16
Reference
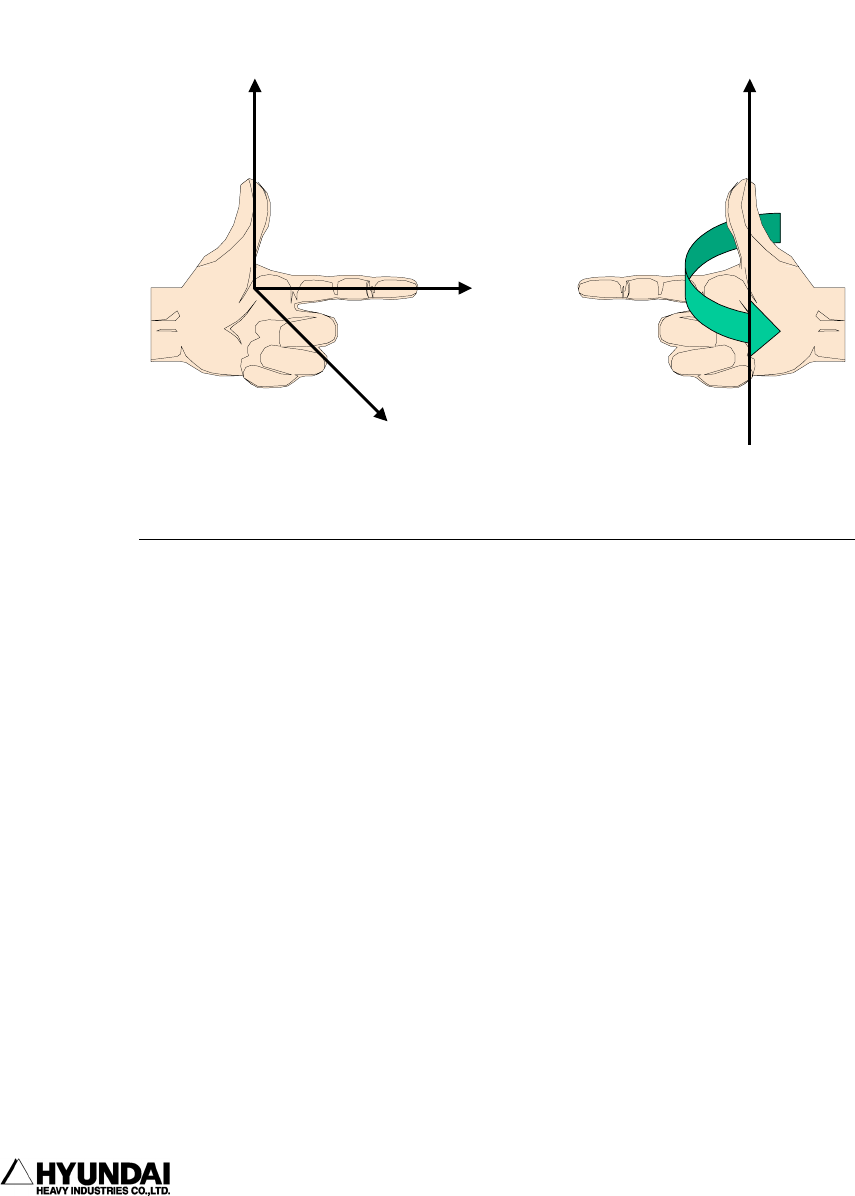
The following figure shows that how to determine the robot coordinate system. Stretch out left
hand's three fingers ; thumb, point finger and middle finger at a right angle. It means that
when the point finger's direction is aligned with Y-direction of robot coordinate, thumb's
direction is pointing Z and point finger's direction is pointing X.
X
Y
Z
+
(X,Y,Z)
R
(X,Y,Z)
+
Forward direction
Axis direction
Rotation direction
<Reference>