



















10. Menu Tree
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
----------------------------------------------------------------------------------------
10 - 3
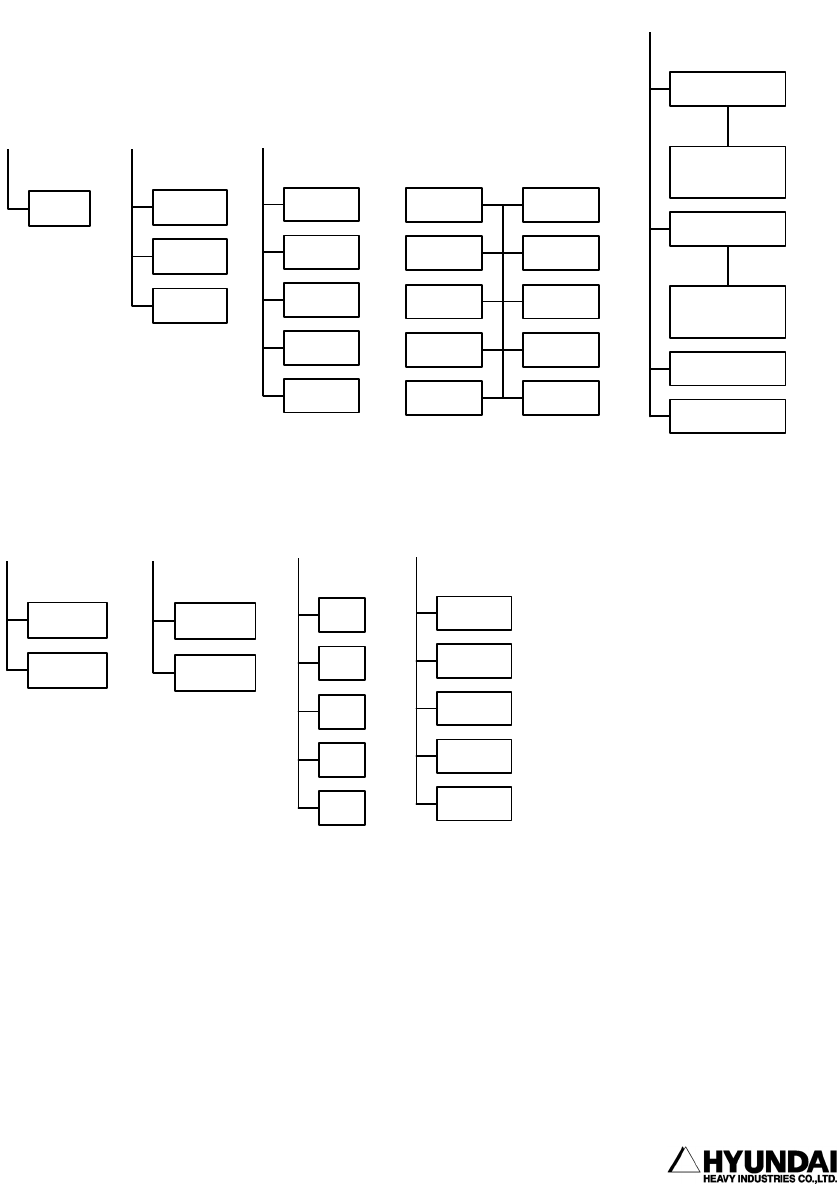
10.2 Move, I/O
Grammar:
MOVE <interpolation> [,<pose>] , S=<speed> , A=<accuracy> , T=<TOOL> [,MX] [,MX2]
[,G1] [,G2] [,BM] [,UNTIL <conditional expression>]
Grammar:
PRINT <ouput direction> , <information,...>
mm/sec, sec
cm/min, %
Unit
mm/sec, sec
cm/min, %
Conversion
Variable
Expr.
,S=100
MOVE
/
/
/
/
MOVE
OFF
Linear
Circular
/
/
P
P
P[]
P*
P.Const
Local
,P1
+R +LR
+R[] +LR[]
Local Global
Variable Variable
Expr. Expr.
/
Variable
Expr.
/
/
/
,A=0
Variable
Expr.
/
/
/
,H=0
MX
MX2
G1
G2
BM
,_MX
<
>
=
Variable
Expr.
UNTIL _DI20=1